|
|
Эхолот для любительской рыбалки
Версия для печати
Электрический сигнал частотой 150-200 кГц и длительностью 35-50 мкc, вырабатываемый генератором, подается на излучатель (частота генератора является резонансной для элемента). А излучатель, потеря энергии в котором около 20-30 %, "выстреливает" в сторону дна соответствущий У3 импульс. Одновременно с этим "выстрелом" включаются внутренние "часы", определяющие время полета туда и обратно. Отраженный от чего-либо сигнал "услышал" датчик, снова, с соответствующими потерями, преобразовал его в электрический сигнал. И послал сравниваться с исходными данными. Дождавшись прихода эхо (если его долго нет, то прибор автоматически понижает частоту "выстрелов" до минимально возможного значения), производится новый выстрел, а тем временем полученный от первого выстрела результат делится пополам, маленький пересчет, и на экране появляется цифра (метров или футов) и точка дна, соответственно выбранному автоматически или вручную масштабом. После подсчетов результата второго выстрела выводится новая или дублируется старая цифра и ставится новая точка, соединенная линией со старой. Таким образом, на экране рисуется некая линия, имеющая определенную толщину и представляемая нам на дисплее, как линия дна. Интересный вопрос, насколько достоверна информация на экране и какой на самом деле рельеф дна под килем катера в данный момент? Ведь посланный У3 импульс отразился от первого попавшего в конус излучения предмета, имеющего иную, чем вода, плотность. Это может быть и резкая граница между слоями воды с разной температурой - термоклин. Если все-таки это предмет, то насколько большим он должен быть на дне, чтобы отразиться на экране? Его линейные размеры, очевидно, должны быть больше длины волны У3 сигнала.
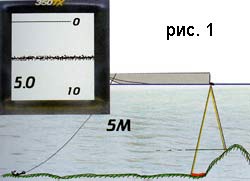 Он должен также иметь достаточную площадь поверхности для отражения в нужном направлении У3 сигнала. На глубине примерно 5 м в случае 100 % от отраженного сигнала без учета потерь - это площадь, равная нескольким квадратным сантиметрам. С учетом потерь мощности сигнала по разным вышеуказанным причинам эхолот поймает отраженный сигнал, если площадь поверхности, от которой произошло отражение, измеряется уже десятками квадратных сантиметров.
Он должен также иметь достаточную площадь поверхности для отражения в нужном направлении У3 сигнала. На глубине примерно 5 м в случае 100 % от отраженного сигнала без учета потерь - это площадь, равная нескольким квадратным сантиметрам. С учетом потерь мощности сигнала по разным вышеуказанным причинам эхолот поймает отраженный сигнал, если площадь поверхности, от которой произошло отражение, измеряется уже десятками квадратных сантиметров.
 На рисунке 2 приведена иллюстрация стоянки рядом с подводным валуном. Часть У3 пучка падает на наклонную поверхность и, отражаясь в сторону, на датчик не попадает. Отражается в сторону датчика лишь та часть сигнала, которая попала на дно (зона отражения на рисунке 1 отмечена красным). Если величина подводного препятствия такова, что пятно луча целиком укладывается на наклонную поверхность, то отражения в сторону излучателя не проиходит. В этом случае эхолот будет "глючить", а именно, произойдет либо срыв изображения, либо он отловит многократно отраженный сигнал и покажет глубину, близкую к своему предельному значению (рисунок 2).
На рисунке 2 приведена иллюстрация стоянки рядом с подводным валуном. Часть У3 пучка падает на наклонную поверхность и, отражаясь в сторону, на датчик не попадает. Отражается в сторону датчика лишь та часть сигнала, которая попала на дно (зона отражения на рисунке 1 отмечена красным). Если величина подводного препятствия такова, что пятно луча целиком укладывается на наклонную поверхность, то отражения в сторону излучателя не проиходит. В этом случае эхолот будет "глючить", а именно, произойдет либо срыв изображения, либо он отловит многократно отраженный сигнал и покажет глубину, близкую к своему предельному значению (рисунок 2).  Если подобная ситуация складывается на небольшой волне, которая чуть-чуть меняет направление излучения, то прибор будет рисовать сложный рельеф с большим перепадом глубин.
Если подобная ситуация складывается на небольшой волне, которая чуть-чуть меняет направление излучения, то прибор будет рисовать сложный рельеф с большим перепадом глубин.
При попадании в конус луча части каменистого дна, состоящей из некрупного щебня, или на гряду мелких камней, эхолот интерпретирует этот рельеф, как толстый слой ила из-за того, что отраженный сигнал приходит и от поверхности, и от основания камней (рисунок 3).
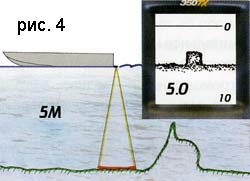
Теперь начинаем неспешное движение нашего плавсредства. Все в точности повторяется, только уже вполне реальны изменения и глубины, и рельефа дна, и состав грунта дна. Посмотрим, какие варианты могут повстречаться на пути. Прохождение препятствия (рисунок 4) даст на экране несколько искаженную картинку, так как острый пик не имеет достаточно поверхности для отражения сигнала нужной нам мощности, поэтому не все детали отобразятся на экране прибора.
 Некоторое разочарование может постигнуть наблюдателя и при движении лодки вдоль свала, потому что эхолот будет видеть лишь самое дно по той причине, что сигнал, благополучно отражаясь от стенки, уйдет в сторону и пройдет мимо датчика. Это означает, что найти cвал или бровку в олин проход, двигаясь вдоль нее, не удастся. Придется делать несколько проходов по траекториям, пересекающимся в интересующей нас точке (рисунок 5).
Некоторое разочарование может постигнуть наблюдателя и при движении лодки вдоль свала, потому что эхолот будет видеть лишь самое дно по той причине, что сигнал, благополучно отражаясь от стенки, уйдет в сторону и пройдет мимо датчика. Это означает, что найти cвал или бровку в олин проход, двигаясь вдоль нее, не удастся. Придется делать несколько проходов по траекториям, пересекающимся в интересующей нас точке (рисунок 5).
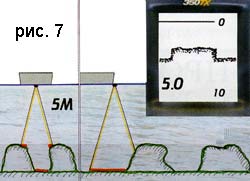
При пересечении лучом подводной канавы она тоже останется не выявленной, если ее ширина окажется меньше диаметра пятна луча на дне (рисунок 6). Если лодка проходит над скоплением больших валунов, не находящихся под килем, но попадающих в зону облучения эхолота, то они появятся на эхограмме не как отдельные камни, а как некое сплошное возвышение, расположенное под лодкой (рисунок 7). Приведенные иллюстрации идеализируют реальную геометрию подводных препятствий и даны здесь для понимания сути процесса и динамики появления картин на экране эхолота. В реальных условиях подводного мира весьма редко встречаются естественные прямолинейные придонные образования. Даже на достаточно ровной, близкой к плоской, наклонной поверхности может находиться слой песка, ила или какой-то растительности, которые частично отразят сигналы вверх к датчику и дадут возможность сформировать вразумительное изображение. Практика показывает, что именно нагромождения подводных валунов могут дать наименее достоверную картину рельефа дна на экране.
 Следующий фактор, который может несколько усложнить жизнь рыбака - это небольшие подводные препятствия (естественного или искусственного происхождения). которые могут оказаться на дне. У них нет достаточных размеров для создания эха необходимой громкости, и эхолот их попросту не замечает. Но блесны и воблеры этот "мусор" удерживает на удивление крепко.
Следующий фактор, который может несколько усложнить жизнь рыбака - это небольшие подводные препятствия (естественного или искусственного происхождения). которые могут оказаться на дне. У них нет достаточных размеров для создания эха необходимой громкости, и эхолот их попросту не замечает. Но блесны и воблеры этот "мусор" удерживает на удивление крепко.
 Некоторые выводы
Некоторые выводы
Итак, результаты проведенного анализа дают неопровержимое понимание того, что:
- Нарисованная на экране картинка линии дна - это не изображение, полученное с выносной видеокамеры, а результат обработки У3 импульсного сигнала со всеми помехами и погрешностями. Происходит перенос реального трехмерного пространства в изображение на экран, то есть на плоскость с двумя измерениями.
- Сами эхолоты не имеют отечественного или западного ГОСТа (сертификата) и не прошли процедуру поверки в Палате мер и весов как измерительное средство. А значит, все их измерения очень и очень приблизительны. Использование показаний эхолота для тестирования снастей, как правило, некорректно и полученные результаты весьма далеки от истины. При прочих идеальных условиях отклонение от точного измерения глубины может быть в пределах 1-4 %.
- Картина рельефа дна будет представлена наиболее искаженно, если плавсредство движется по воде во время сильного ветра и волнения. Постоянное изменение угла наклона излучателя вносит существенные коррективы в работу прибора, еще более снижая достоверность прорисовки эхограммы дна под лодкой. В этой ситуации возможны частые сбои в работе, если излучатель оказывается над поверхностью воды или в зоне, носыщенной пузырьками воздуха.
- Воздушные пузырьки мешают точной работе прибора при увеличении скорости движения судна. При выходе на режим глиссирования нарушается ламинарное обтекание корпуса датчика, возникают турбулентные завихрения. Они, в свою очередь, затрудняют замеры глубины глубины на скоростях более 20 км/ч.
- Чувствительность прибора определяет аккустическими и электрическими параметрами схемы, которые могут быть несколько ниже реальных возможностей разрешения ЖК дисплея.