|
|
Принципи побудови телевізійних вимірювальних систем.
Телевізійні вимірювальні системи (ТВС) є одним з найбільш важливих класів інформаційних скануючих систем, які широко застосовуються в автоматизованих системах управління, обробки наукової інформації і т. д. В ТВС, як і в інших інформаційних скануючих системах, здійснюється послідовне сканування багатовимірного вхідного сигналу зчитування апертурою і перетворення його в одновимірний електричний сигнал. Процеси обробки електричного сигналу в інформаційних скануючих системах різних класів практично однакові.
Незважаючи на велику різноманітність завдань, що вирішуються за допомогою ТВС, можна уявити узагальнену функціональну схеми, що складається з декількох основних модулів (рис. 7.1). Частина входять в схему модулів є обов'язковою незалежно від розв'язуваної задачі.
До обов'язкових модулів належать:
Система формування зображення (СФЗ), яка здійснює попередню обробку вхідного сигналу і формує двовимірну функцію E(x, y), пропорційну яскравості і заданій на площині зображення фотоелектричного перетворювача, або фотоносіїв. В загальному випадку формується серія зображень, відповідних конкретним моментам часу, спектральному діапазону, проекціям тривимірного простору.
Датчик первинних відліків (ДПВ), у якому здійснюється: фотоелектричне перетворення двовимірної функції E(x, y) в одновимірну UС(t) – відеосигнал; попередня обробка відеосигналу, що полягає в посиленні, тимчасової затримки, стробуванні, нелінійному обмеженні, просторової фільтрації, нормуванні та інших операціях, в результаті яких формується вимірювальний сигнал, характеристики якого погоджені з відповідними характеристиками пристроїв отримання первинних відліків відеосигналу по динамічному діапазону зміни амплітуди сигналу, смузі частот, тимчасовому положенню і т. п.; формування первинних відліків амплітуди відеосигналу, що відповідають певним значенням параметрів зчитування апертури, в якості яких можуть бути координати, що визначають положення апертури в площині зображення ФЕП, пов'язані з координатами простору вхідного сигналу, орієнтація – у разі анізотропної апертури – і інші параметри, визначають вагову функцію апертури;
синхрогенератор, що забезпечує формування тимчасовим відсіченням сітки імпульсів, необхідних для управління згорткою, АЦП та іншими елементами ТВС та отримання тимчасового відліку;
вимірювальний пристрій (Вим) здійснює обробку первинних відліків, що включає облік помилок, двовимірну фільтрацію, усереднення, інтерполяцію і т. п., а також перетворення оброблених первинних відліків в оцінки вимірюваних величин (яскравості, координати, площі, колір, а також інші величини) та їх розподілу; в режимі селекції та цілевказівки здійснює також виділення вимірюваних об'єктів або грубу вказівку значень вимірюваних величин за заздалегідь відомим відомостями про вхідний сигнал, або за даними, отриманим в процесі вимірювання.
Необов'язковими модулями є:
пристрій індикації (Інд), який при необхідності забезпечує можливість документування, візуального контролю за процесом перетворення сигналу в ТВС, участі оператора на різних стадіях обробки сигналу, зокрема для введення цілевказівки при виділенні вимірюваних об'єктів, а також для оцінки вимірюваної величини в метричних системах; апаратура калібрування (АК), яка використовується тільки в високоточних ТВС для попередньої оцінки функцій коригувальних сигналів або параметрів окремих ланок ТВС.
 |
Рис. 7.1. Узагальнена функціональна схема ТВС
Відмінні риси класу ТВС укладаються в наявності оптичного сигналу (зображення) на вході системи і в способах його перетворення в електричний сигнал.
Виділяють три способи побудови ТВС: апаратний; програмний; програмно-апаратний.
Принципи апаратної реалізації ТВС. При апаратній реалізації (рис. 7.2.), в складі ТВС крім ТВД можна виділити групу вузлів, об'єднаних в блок попередньої обробки відеосигналу, і вимірювальний блок. Головною особливістю схеми є те, що кожен вузол може виконувати єдину операцію обробки сигналу, яка визначається його внутрішньою структурою. Виконання складного алгоритму обробки, що включає кілька операцій, досягається послідовним включенням відповідних вузлів. для переходу до іншого алгоритму обробки за допомогою комутуючих пристроїв складається новий ланцюг вузлів (з числа тих, що входять до складу блоку).
Принцип роботи телевізійного координатора із слідкуючим стробом, полягає в наступному. Блок попередньої обробки відеосигналу призначений для усунення тих його складових, які перешкоджають проведенню операцій виявлення об'єкта (в режимі пошуку) і вимірювання його координат (в режимі стеження), а також для перетворення сигналу на вході вимірювального блоку до виду, найбільш зручного для виконання вимірювального алгоритму. До складу блоку входять вузли обробки відеосигналу: фільтр (Ф), перетворювач стандарту (ПС), перетворювач форми подання сигналу (ПФПС) і пристрій вибірки (ПВ) сигналу, вузол, що дозволяє змінювати структуру блоку при переході з режиму пошуку в режим стеження, і навпаки: електронний комутатор (ЕК), а також генератор стробу (ГС) і спеціалізований синхрогенератор (ССГ), що працює в підпорядкованому режимі за синхросигналами, виділеним з відеосигналу з виходу ТВД, і забезпечує роботу всіх вузлів ТВС за допомогою тактових та інших опорних синхронізуючих сигналів.
До складу вимірювального блоку входять обчислювач (О), що виконує основний вимірювальний алгоритм, пристрій реєстрації та індикації (ПРІ) вимірюваного параметра об'єкта і формувач сигналів управління (ФСУ). На одному виході ФСП формується сигнал «пошук/стеження» (П/С), на іншому – сигнал, що суміщає центр стеження стробу із зображенням об'єкта. У початковому стані ТВС знаходиться в режимі пошуку. При цьому електронний комутатор забезпечує проходження відеосигналу по ланцюгу Ф-ПС-ПФПС і далі на вхід обчислювача.
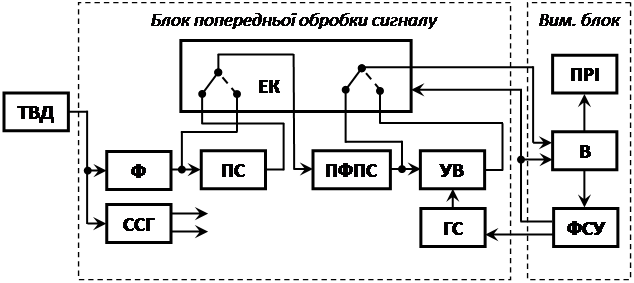
Рис. 7.2. Структурна схема ТВС при апаратній реалізації
Обчислювальний алгоритм в режимі пошуку реалізує операції виявлення сигналу об'єкта шляхом порогової обробки вхідного сигналу по всьому растру і визначення координат виявленого об'єкта. Після виявлення об'єкта ТВС переводиться в режим стеження (шляхом формування сигналу «стеження» на виході ФСП). Електронний комутатор переводиться в стан, при якому відеосигнал від ТВД проходить на вхід обчислювача по ланцюгу Ф-ПФПС-ПВ. Пристрій вибірки забезпечує стробування відеосигналу на ділянці растра, що збігається із зображенням об'єкта, так як первісна установка генератора стробу проводиться за координатами об'єкта, обчисленими на етапі виявлення. У режимі спостереження обчислювач виконує алгоритм вимірювання координат об'єкту щодо центру стробу і через формувач сигналів управління вводить відповідну поправку в положення стробу, що виробляється генератором стробу в черговому кадрі. В результаті центр слідкуючого стробу поєднується з центром об'єкту.
У якості перетворювача форми подання сигналу найбільш широко використовують аналого-цифрові (АЦП) і цифро-аналогові перетворювачі (ЦАП), упорядковану запис цифрового відеосигналу в матричну пам'ять і створення, таким чином, цифрового зображення. Можливо також застосування більш складних функціональних перетворень сигналу – перетворення Фур'є (ПФ) і автокореляційної функції (АКФ). Пристрій вибірки також досить часто використовується в якості елемента структури ТВС, призначеного для зменшення обсягу інформації на вході обчислювального блоку за умови, що місце розташування об'єкта в межах растру локалізовано та обмежено розмірами стробу. Стробування сигналу дозволяє збільшити завадостійкість ТВС, знижує вимоги до швидкодії обчислювача, дозволяє використовувати більш досконалі обчислювальні алгоритми.
Апаратний метод реалізації ТВС має ряд недоліків. Головний з них полягає в жорсткій структурі схеми пристрою, орієнтованої на виконання одного алгоритму обробки інформації. Перехід до іншого алгоритму пов'язаний зі зміною структури пристрою шляхом перемикання обмеженого набору функціональних вузлів. Вибір функціональних вузлів проводиться з обмеженого набору.
Принципи програмної реалізації ТВС. При програмному методі реалізації до складу ТВС входять (рис. 7.3.) ТВД, інтерфейс і ЕОМ. Блок інтерфейсу призначений для узгодження ТВД з ЕОМ шляхом перетворення аналогового відеосигналу в цифрову форму і його запису до пам'яті ЕОМ. Алгоритм вимірювання реалізується програмно і може бути легко адаптований до розв'язуваної задачі. У цьому випадку обмеження щодо класу вимірювальних алгоритмів визначаються лише швидкодією ЕОМ. При необхідності результат вимірювання через інтерфейс може бути виведений для індикації, реєстрації або управління.
 |
Рис. 7.3. Структурна схема ТВС при програмній реалізації
З порівняння схем апаратної і програмної реалізації видно, що в останньому випадку ЕОМ доручається як попередня обробка цифрового відеосигналу, так і виконання основного вимірювального алгоритму.
Програмний метод (рис. 2.3.) реалізації ТВС має поряд переваг в порівнянні з апаратним методом, головним з них є гнучкість такої системи, тому що перехід до іншого алгоритму, як правило, пов'язаний зі зміною програмного забезпечення ЕОМ, однак, програмний метод в ряді випадків поступається по продуктивності апаратному.
Практична частина