|
|
Жесткость и центрирующая сила АМЦ.
Ток в обмотках на полюсах центрирующего элемента АМЦ с ШИМ изменяется по экспоненциальному закону:
I(t)=Im(1-e-t/tв), (1)
Где Im – установившееся значение тока импульса АМЦ;
 (2)
(2)
Где  -постоянная времени центрирующего элемента;
-постоянная времени центрирующего элемента;
W- число витков обмотки;
R0- магнитное сопротивление рабочих зазоров;
r- омическое сопротивление;
 - выходное сопротивление блока управления;
- выходное сопротивление блока управления;
 - сопротивление потерь в статоре и роторе ЭЦ;
- сопротивление потерь в статоре и роторе ЭЦ;
 –дополнительное сопротивление, необходимое для уменьшения ;
–дополнительное сопротивление, необходимое для уменьшения ;
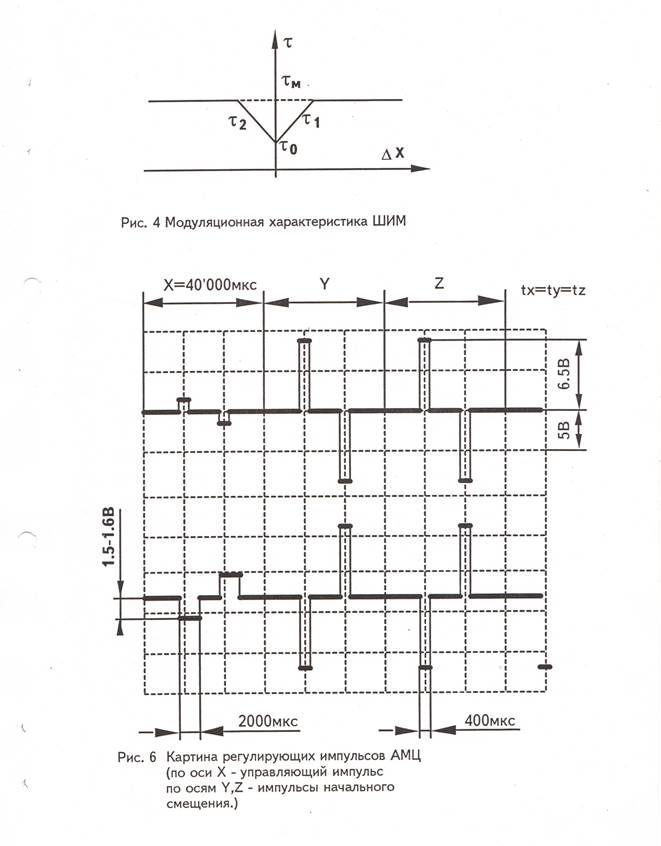
Предполагается, что блок управление АМУ обеспечивает модуляционную характеристику длительности импульсов тока управления, представленную на рис. 4
(τ0- начальная длительность импульсов ШИМ; τm– набольшая длительность импульсов ШИМ; k’ –крутизна модуляционной характеристики, мкс/ мкм; τ1,τ2 – длительность центрирующих импульсов ШИМ; Δ-перемещение ротора центрирующего элемента).
Если пренебречь влиянием заднего фронта центрирующего импульса, то средняя за период T широтно-модулированных импульсов блока управления АМЦ сила притяжения одного полюса равна:

Где τ- длительность импульсов (τ<T);
 –магнитная проницаемость вакуума;
–магнитная проницаемость вакуума;
S – площадь одного полюса центрирующего элемента (рис. 1).
После интегрирования:
 (3)
(3)
 где Fm- наибольшая сила притяжения одного полюса;
где Fm- наибольшая сила притяжения одного полюса;
 (4)
(4)
g -отношение постоянной времени обмотки центрирующего элемента к периоду ШИМ
g=τ/T; (5)
b -параметр длительного импульса, показывающий, во сколько раз длительность импульса превышает постоянную времени центрирующего элемента;
b = τ/τв; (6)
Радиальная центрирующая сила электромагнитного подвеса Fцх, в создании которой участвуют 4 пары полюсов двух восьмиполюсных центрирующих элементов, равна:

гдеF1 иF2 –силы притяжения противоположных полюсов одного центрирующего элемента.
С учётом (3):
 (7)
(7)
где b1и b2 – безразмерные параметры (см. (6)) длительности импульса в обмотках противоположны магнитопроводов одного центрирующего элемента;

Где  -угол скоса полюсов (Рис. 1).
-угол скоса полюсов (Рис. 1).
Если модуляционная характеристика АМЦ с ШИМ имеет вид, представленный на Рис. 4, то при положительном смещении ротора ΔXв направлении оси Xможно записать:
b1 = τ1/τв=τ0/τв=b0;
b2 = τ2/τв=(τ0+k’|Δ|)/ τв, |Δ|≤( τm- τ0)/ k’, Δ=Δxcos(p/8); (8)
b2 = τ2/ τв = τm/ τв=bm ,|Δ|>|≤( τm- τ0)/ k’,
Где b0 –параметр длительности начального импульса;
bm–параметр максимального регулирующего импульса длительностьюτm;
Первое из соотношений (8) отражает постоянство регулирующего импульса напряжения блока управления АМЦ, поступающего в полюс, рабочий зазор которого уменьшается. Второе соотношение показывает линейное увеличение длительности регулирующего импульса блока управления АМЦ в полюсе, рабочий зазор которого увеличивается. Третье соотношение учитывает зону насыщения модуляционной характеристики.
Подставим выражения (8) для b1и b2 в (7), получим для линейного участка модуляционной характеристики:
 (9)
(9)
Где  - отношение крутизны модуляционной характеристики к постоянной времени выходной цепи импульсного усилителя мощности.
- отношение крутизны модуляционной характеристики к постоянной времени выходной цепи импульсного усилителя мощности.
Отсюда с учетом (5) радиальная жесткость активного магнитного подвеса в центральном положении ротора при Δ=0 и произвольном b равна:
 (10)
(10)
Где  –доля периода, на которую увеличивается ШИМ-сигнал блока управления АМЦ при единичном радиальном смещении ротора.
–доля периода, на которую увеличивается ШИМ-сигнал блока управления АМЦ при единичном радиальном смещении ротора.
Требуемая начальная жесткость подвеса достигается соответствующим выбором относительной крутизны модуляционной характеристики блока управления АМЦ и параметраb0 – длительность начального импульса.
Из (9), с учетом (5) наибольшая радиальная центрирующая сила АМЦ равна:
 (11)
(11)
Анализ этого соотношения показывает, что центрирующая сила АМЦ на линейном участке модуляционной характеристики линейно зависит от перемещения лишь при достаточно больших значениях b0. В этом случае, например 0,04 и им можно пренебречь.
Наибольшая осевая центрирующая сила, в создании которой участвуют 8 пар полюсов двух центрирующих элементов, равна:
 (12)
(12)
где  –осевая сила притяжения одного полюса;
–осевая сила притяжения одного полюса;
Начальная осевая жесткость активного магнитного подвеса в центральном положении ротора при произвольном b0 равна:
 (13)
(13)
где – доля периода, на которую увеличивается ШИМ-сигнал блока управления АМЦ при единичном осевом смещении ротора.