|
|
С ПОМОЩЬЮ АНАЛОГОВОГО ВЫЧИСЛИТЕЛЬНОГО КОМПЛЕКСА СУЛ-3
Для отработки программного обеспечения ЦСУ в установке использован имитатор объекта – аналоговый вычислительный комплекс СУЛ-3 (рис. 15).
Аналоговый имитатор СУЛ-3 предназначен для формирования управляющих воздействий и структурного моделирования объектов и систем автоматического регулирования.
СУЛ-3 позволяет на моделях проводить исследование динамических характеристик объектов регулирования, описываемых дифференциальными уравнениями 1-го – 2-го порядков; моделировать поведение объектов при нанесении случайных и детерминированных воздействий; моделировать поведение замкнутой системы с ПИД-регулятором.

Рис. 15. Схема подключения СУЛ-3 к рабочей станции (ПЭВМ)
В имитаторе СУЛ-3 предусмотрены следующие элементы контроля и управления:
- коммутирующие переключатели и потенциометры для задания параметров (постоянных времени и коэффициентов передачи сигналов);
- вольтметр для индикации сигналов в контрольных точках;
- кнопки вывода сигналов на вольтметр;
- кнопки управления режимом работы СУЛ-3 (“Исходное положение” / ”Работа”);
- светодиодные индикаторы секундомера с переключателем источника его остановки;
- индикаторы полярности сигнала на выходе нелинейного элемента (моделирование гистерезисной статической характеристики).
В работе СУЛ-3 используется только для физического моделирования объекта.
Схемы подключения аналогового имитатора к УСО (модулям МВУ8 и МВА8) представлены на рис. 16, 17.

Рис. 16. Схема подключения модуля МВУ8 к входу имитатора
(управляющее воздействие 0…10 В)

Рис. 17. Схема подключения модуля МВА8 к выходу имитатора
(регулируемый параметр 0…1 В)
Управляющий сигнал поступает на модель объекта регулирования, которая генерирует поведение объектов первого и второго порядков с передаточными функциями:

или (1)
 ,
,
где  – оператор Лапласа;
– оператор Лапласа;  – изображения по Лапласу управляющего воздействия и регулируемой величины;
– изображения по Лапласу управляющего воздействия и регулируемой величины;  – коэффициент передачи модели объекта ( =10);
– коэффициент передачи модели объекта ( =10);  – коэффициент передачи потенциометра модели (
– коэффициент передачи потенциометра модели (  );
);  – постоянные времени (устанавливаются с помощью переключателей в диапазоне 0¸1 с; в конструкцию СУЛ-3 добавлены два магазина конденсаторов для увеличения постоянных времени до нескольких минут – переключатели находятся на верхней крышке прибора).
– постоянные времени (устанавливаются с помощью переключателей в диапазоне 0¸1 с; в конструкцию СУЛ-3 добавлены два магазина конденсаторов для увеличения постоянных времени до нескольких минут – переключатели находятся на верхней крышке прибора).
Настройка модели объекта осуществляется с помощью коммутирующих переключателей и потенциометров (рис. 18, 19).
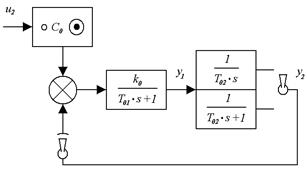

Рис. 18. Фрагмент лицевой панели СУЛ-3:
 – кнопка вывода сигнала на вольтметр;
– кнопка вывода сигнала на вольтметр;  – ручка потенциометра;
– ручка потенциометра;  – коммутирующий переключатель;
– коммутирующий переключатель;  – некоторые
– некоторые
неизвестные постоянные времени

Рис. 19. Фрагмент верхней крышки СУЛ-3:
 – делители напряжения (для подключения МВА8);
– делители напряжения (для подключения МВА8);  – стрелка (показывает направление увеличения/уменьшения постоянной времени при положении переключателей)
– стрелка (показывает направление увеличения/уменьшения постоянной времени при положении переключателей)
После настройки структуры и параметров модели объекта можно оценить ее динамику, получив кривую разгона. Для этого в задающем устройстве формируется типовой входной сигнал  (при переходе из режима “Исходное положение” в режим ”Работа”), описываемый одной из следующих зависимостей:
(при переходе из режима “Исходное положение” в режим ”Работа”), описываемый одной из следующих зависимостей:
 ,
,
 , (2)
, (2)
 ,
,
где  =6 рад/с.
=6 рад/с.
Амплитуда сигнала устанавливается потенциометром и индуцируется вольтметром при установке его переключателя в положение “G”.
Работа замкнутой ЦСУ на аналоговом имитаторе СУЛ-3 может быть смоделирована в двух вариантах:
- применяя двухпозиционный или ПИД- законы регулирования микропроцессорного контроллера ТРМ151;
- используя алгоритмы регулирования разработанных проектов Trace Mode [12] (алгоритмы составляются с помощью FBD- и ST- программ SCADA-системы).
В библиотеке визуального редактора FBD-программ имеется стандартный блок цифрового ПИД-регулятора (рис. 12):
 (3)
(3)
где  – управляющее воздействие и рассогласование на
– управляющее воздействие и рассогласование на  -ом такте квантования сигналов;
-ом такте квантования сигналов;  – настроечные параметры регулятора;
– настроечные параметры регулятора;  – длительность такта квантования сигналов.
– длительность такта квантования сигналов.
Разработан пользовательский FBD-блок для реализации нетиповых цифровых регуляторов различных порядков в Trace Mode [1, 3]:
 , (4)
, (4)
где  - порядок цифрового регулятора;
- порядок цифрового регулятора;  - настройки;
- настройки;  - коэффициент (при =0 исключается И-составляющая из алгоритма).
- коэффициент (при =0 исключается И-составляющая из алгоритма).
FBD-блок цифрового регулятора включен в проект Trace Mode по настройке и исследованию замкнутой ЦСУ (рис. 20).
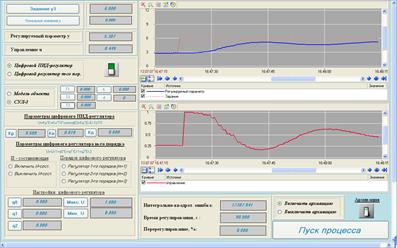
Рис. 20. Экранная форма проекта “Настройка и исследование ЦСУ”
(меню управления и динамические характеристики системы)
Для оптимального параметрирования регуляторов (4) применяется прикладное ПО [4].
Анализ исследования систем с различными регуляторами выполняется по показателям качества (интегрально-квадратичная ошибка, время регулирования и перерегулирование) [1], которые рассчитываются в реальном времени.