|
|
Пример выполнения расчетного задания
Исходными данными для расчета является система дифференциальных уравнений:

Решение
1. Составим структурную схему САУ. Положим начальные условия нулевыми и перепишем систему уравнений в операторной форме:
Полученной схеме соответствует схема, представленная на рис.1:
|
|
|
|
|
|
|
|

Рис.1
2. Для нахождения передаточной функции разомкнутой САУ  преобразуем сртуктурную схему, представленную на рис.1. Для этого воспользуемся правилами структурных преобразований. Последовательность преобразований представлена на рис.2а и 2б:
преобразуем сртуктурную схему, представленную на рис.1. Для этого воспользуемся правилами структурных преобразований. Последовательность преобразований представлена на рис.2а и 2б:
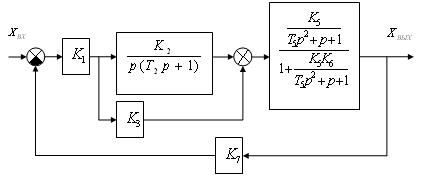
Рис.2а
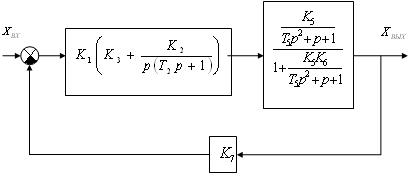
Рис.2б
Искомая передаточная функция разомкнутой системы будет иметь вид:  .
.
Подставим в функцию значения параметров и упростим выражение. Для этого можно использовать, например, символьные преобразования MathCAD:
Найдем корни полиномов второго порядка в числителе и в знаменателе (также с помощью символьных преобразований MathCAD):
 .
.
Таким образом, передаточная функция разомкнутой системы будет иметь следующий вид:

3. Для построения асимптотических частотных характеристик системы запишем выражения:
комплексного коэффициента усиления: 
Амплитудно-частотной характеристики:

Логарифмической амплитудно-частотной характеристики:

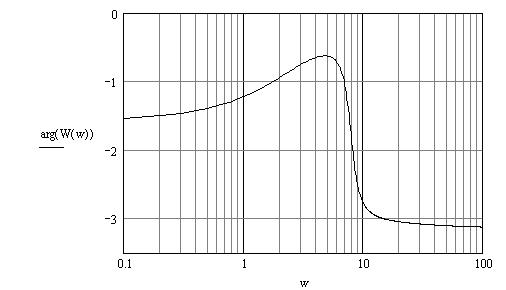
Фазовой частотной характеристики:
 ,
,
где  .
.
Построим асимптотическую ЛАЧХ. Для этого определим сопрягающие частоты и их логарифмы:

и найдем выражения для асимптот для каждого диапазона частот:
1)  . Для этого диапазона будет справедливо выполнение следующих неравенств:
. Для этого диапазона будет справедливо выполнение следующих неравенств:  ;
;  ;
;  ;
; 
и асимптотическая ЛАЧХ в этом диапазоне будет иметь вид:

2) 
 ; ; ;
; ; ;

3) 
;  ; ;
; ;

4) 
; ;  ;
;

5) 
; ; ; 

Асимптотическая ЛАЧХ и соответствующая ей ЛФЧХ представлены на рис. 3:
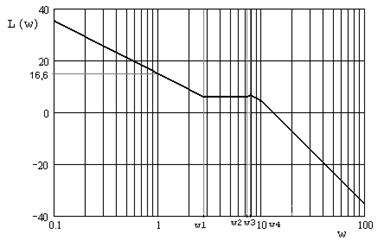

Рис.3
АФХ разомкнутой системы представлена на рис.4:
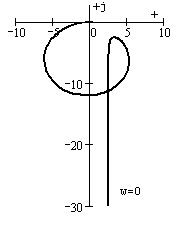
Рис.4
4. Построим частотные характеристики разомкнутой системы с помощью пакета MathCAD:

АФХ разомкнутой системы построим двумя способами: в декартовых и в полярных координатах
5. Определим устойчивость замкнутой САУ.
1) По критерию Найквиста: для того, чтобы выбрать нужную формулировку критерия, необходимо определить устойчивость разомкнутой системы. Для этого найдем корни ее характеристического полинома (например, с помощью функции solve MathCAD):

Поскольку характеристический полином имеет один нулевой корень и три корня с отрицательной действительной частью, разомкнутая система является нейтрально устойчивой. Поэтому, как следует из формулировки критерия для этого случая, замкнутая система устойчива - АФХ разомкнутой системы вместе со своим дополнением в бесконечности не охватывает точку с координатами (-1;j0). Причем замкнутая система является устойчивой при любом коэффициенте усиления, т.к. АФХ разомкнутой системы проходит ниже оси абсцисс.
2) По критерию Гурвица: для этого необходимо записать передаточную функцию замкнутой САУ:
Составим определители Гурвица из коэффициентов характеристического полинома замкнутой системы:
Все определители положительны при положительном коэффициенте с0, следовательно, замкнутая система устойчива.
3) По необходимому и достаточному условию устойчивости: для этого необходимо определить корни характеристичкского полинома замкнутой системы

Все корни характеристичкского полинома имеют отрицательную действительную часть, следовательно, в соответствии с необходимым и достаточным условием устойчивости, замкнутая система устойчива.
6. Построим временные характеристики системы, для чего воспользуемся формулой разложения. Запишем в MathCAD выражения для передаточной функции замкнутой системы, полиномов ее числителя В(р) и знаменателя А(р), а также полинома  :
:
 .
.
Корни полинома знаменателя (характеристического уравнения системы):
 .
.
Построим переходную функцию замкнутой системы:
Построим весовую функцию замкнутой системы:

7. Для того, чтобы определить установившиеся значения сигнала δ, необходимо записать передаточную функцию замкнутой системы как 
Установившееся значение сигнала δ при подаче на вход САУ воздействия в виде единичного скачка Хвх=1(t):

Установившееся значение сигнала δ при подаче на вход САУ воздействия в виде линейно возрастающего сигнала Хвх=1∙t:

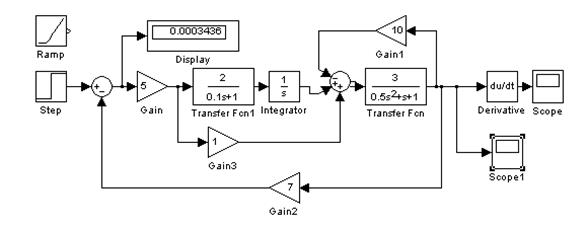
Моделирование в Simulink Matlab производится для ступенчатого и линейно возрастающего сигналов. На рисунке представлено моделирование при ступенчатом входном воздействии:
|
Варианты расчетных заданий

|
|

| 4 
|
|

|

|

|

| 10 
|

|
|

|

|

|
|

|

|
|

|

|

|

|

|

|

|

|

|

|
|

|

|
|

|

|

|
|

|

|

|
|
|

|

|
|
|
|
|
|

|

|
|

|
|
|

|
|

|

|
|

|
|
|
|

|
|
|
|
|

|

|
|

|
|
|

|

|

|
|
|

|

|
|
|

|
|
|

|
|
|
|

|

|

|

|

|
|
|

|
|

|

|
|

|

|

|

|

|

|

|

|
|

|
|

|
|
|
|

|

|
|
|

|
|
|

|

|
|
|

|
|

|

|
|
|

|

|
|
|

|
|
|
|
|
|

|
|
|

|
|
Литература
1. Петрова В.А., Ягодкина Т.В. Математическое описание линейных непрерывных систем автоматического управления. М.: Изд-во МЭИ, 1992, 103 с.
2. Теория автоматического управления./Под ред. А.В. Нетушила, М.: Высш. Шк.,1982, 400 с.
3. Теория автоматического управления./Под ред. Акад. А.А. Воронова, М.: Высш.шк., 1986, 504 с.
4. Ягодкина Т.В., Хризолитова С.А., Бондин О.А. Применение Mathcad для решения задач теории автоматического управления. Учебное пособие. М.: Изд-во МЭИ, 2004, 52 с.
5. Ягодкина Т.В., Хризолитова С.А., Беседин В.М. Исследование САУ с использованием прикладного пакета Matlab. Лабораторный практикум по курсу «Основы автоматического управления». М.: Изд-во МЭИ, 2007, 76 с.
СОДЕРЖАНИЕ
| ВВЕДЕНИЕ…………………………………………………………………………………. | |
| 1..Задание и методические указания по его выполнению..………………………………. | |
| 2. Пример выполнения расчетного задания……………………………………………….. | |
| 3. Варианты расчетных заданий……………………………………………………………. | |
| Литература……………………………………………………………………..………… |
Учебное издание
Т.В. Ягодкина, И.А. Смагина, В.Е. Митрофанов,
АНАЛИЗ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к самостоятельным занятиям по курсу «Теория автоматического управления». – М.:Изд-во МЭИ, 2008,–….с.
Редактор С.А. Хризолитова
Технический редактор Е.Н. Касьянова
Темплан издания МЭИ 2007 (II), метод.
Подписано к печати 11.02.2006г.
Формат бумаги 60х84/16
Физ. печ. л. 3,25 Тираж 50 Изд.N242заказ
Издательство МЭИ, 111250, Москва, Красноказарменная, д.14
Типография Издательства МЭИ, Красноказарменная, 13