|
|
Основные виды рычажных механизмов.
Лекция 1.
Основные понятия и определения.
Теория механизмов и машин занимается исследованием и разработкой высокопроизводительных механизмов и машин.
Механизм– совокупность подвижных материальных тел, одно из которых закреплено, а все остальные совершают вполне определенные движения, относительно неподвижного материального тела.
Звенья – материальные тела, из которых состоит механизм.
Стойка– неподвижное звено.
 Стойка изображается ; конфигурация стойки в курсе ТММ не изучается. Звено, к которому изначально сообщается движение, называется входным (начальным, ведущим). Звено, совершающее движение, для выполнения которого предназначен механизм – выходное звено.
Стойка изображается ; конфигурация стойки в курсе ТММ не изучается. Звено, к которому изначально сообщается движение, называется входным (начальным, ведущим). Звено, совершающее движение, для выполнения которого предназначен механизм – выходное звено.
Кривошипно-
Ползунный
Механизм
Рис.1
Если это компрессор, то зв.1 – входное, а зв.3 – выходное.
Если это механизм ДВС, то зв.3 – входное, а зв.1 – выходное.
Кинематическая пара– подвижное соединение звеньев, допускающее их относительное движение. Все кинематические пары на схеме обозначают буквами латинского алфавита, например A, B, C и т.д.

 Если , то К.П. – вращательная ; если , то поступательная.
Если , то К.П. – вращательная ; если , то поступательная.
Порядок нумерации звеньев:
входное звено – 1;
стойка – последний номер.
Звенья бывают:
· простые – состоят из одной детали;
· сложные – состоят из нескольких, жестко скрепленных друг с другом и совершающих одно и тоже движение.
Например, шатунная группа механизма ДВС.
Звенья, соединяясь друг с другом, образуют кинематические цепи, которые разделяют на:
· простые и сложные;
·  замкнутые и разомкнутые;
замкнутые и разомкнутые;
Пример замкнутой кинематической
цепи на рис.1;
пример разомкнутой цепи:
Машина – техническое устройство, в результате осуществления технологического процесса определенного рода, можно автоматизировать или механизировать труд человека.
Машины условно можно разделить на виды:
· энергетические;
· технологические;
· транспортные;
· информационные.
Энергетические машины разделяют на:
· двигатели;
· трансформирующие машины.
Двигатель – техническое устройство, преобразующее один вид энергии в другой. Например, ДВС.
Трансформаторная машина – техническое устройство, потребляющее энергию извне и совершающее полезную работу. Например, насосы, станки, прессы.
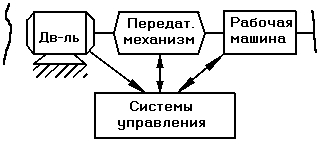
Техническое объединение двигателя и технологической (рабочей машины) – Машинный агрегат (МА).
Внешняя Технологический среда процесс
 |
Двигатель имеет определенную механическую характеристику, рабочая машина тоже. Механические характеристики указаны в техпаспорте.
w1 – скорость, с которой вращается вал двигателя;
w2 – скорость, с которой будет вращаться главный вал рабочей машины.
w1 и w2 нужно поставить в соответствие друг другу.
Например, число оборотов n1 =7000 об/мин., а n2=70 об/мин.
Чтобы привести в соответствие механические характеристики двигателя и рабочей машины, между ними устанавливают передаточный механизм, который имеет свои механические характеристики.
up2=w1/w2=700/70=10
В качестве передаточного механизма могут быть использованы:
· фрикционные передачи (с использованием трения);
· цепные передачи (привод мотоцикла);
· зубчатые передачи.
В качестве рабочей машины наиболее часто используют рычажные механизмы.
Основные виды рычажных механизмов.
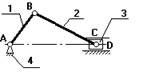
1. Кривошипно-ползунный механизм.
а) центральный (рис.1);
б) внеосный (дезоксиальный) (рис.2);

е - эксцентриситет
Рис. 2
1-кривошип, т.к. звено совершает полный оборот вокруг своей оси;
2-шатун, не связан со стойкой, совершает плоское движение;
3-ползун (поршень), совершает поступательное движение;
4-стойка.
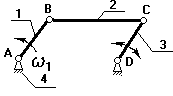 |
2. Четырехшарнирный механизм.
Звенья 1,3 могут быть кривошипами.
Если зв.1,3 – кривошипы, то механизм двукривошипный.
Если зв.1 – кривошип (совершает полный оборот), а зв.3 – коромысло (совершает неполный оборот), то механизм кривошипно-коромысловый.
Если зв.1,3 – коромысла, то механизм двукоромысловый.
3. Кулисный механизм.
 |
1 - кривошип;
2 - камень кулисы (втулка) вместе с зв.1 совершает полный оборот вокруг А (w1 и w2 одно и тоже), а также движется вдоль зв.3, приводя его во вращение;
3 - коромысло (кулиса).

 |
на зв.3 выбирают точку В3 и выбирают в данный момент так, чтобы она совпадала с точкой В.
4.Гидроцилиндр
(в кинематическом отношении подобен кулисному механизму).
 |
В процессе проектирования конструктор решает две задачи:
· анализа (исследует готовый механизм);
· синтеза (проектируется новый механизм по требуемым параметрам);
Лекция 2.
Глава 1. Анализ рычажных механизмов.
В данной главе будут рассмотрены вопросы:
1. структурный анализ механизма (изучение строения механизма);
2. изучение классов и видов кинематических пар.
3. определение числа степеней свободы механизма и определение наличия или отсутствия избыточных связей; в случае наличия – дать рекомендации по способу их устранения;
4. кинематический анализ механизма.
§1.1
Примечание:
Кинематическая пара существует, если не происходит деформации звеньев, образующих эту пару, и не должно происходить отрыва звеньев одно от другого, образующих кинематическую пару.
Примечание:
Ограничения, накладываемые на независимые движения звеньев, образующих кинематическую пару, называются – условия связи S.
Число степеней свободы механизма
W=S+H,
где Н – подвижность.
Любое незакрепленное тело в пространстве имеет 6 степеней свободы, на плоскости – 3.
Классификация кинематических пар проводят либо числу связей, либо по числу подвижностей:
Число связей Класс КП Число подвижностей
S=1 PI H=5
S=2 PII H=4
S=3 PIII H=3
S=4 PIV H=2
S=5 PV H=1
Существует 5 классов кинематических пар.
Примеры различных КП смотри рис. 4-95.
Кинематические пары по характеру контакта звеньев, образующих КП, разделяют на:
1. низшие:
· вращательные;
· поступательные;
2. высшие.
Контакт звеньев в низшей КП осуществляется по поверхности. Контакт звеньев в высшей КП – либо по линии, либо в точке.
§1.2 Определение числа степеней свободы рычажных механизмов.
1.2.1 Плоские механизмы.
В плоском механизме все звенья движутся в одной плоскости, все оси параллельны друг другу и перпендикулярны плоскости механизма.
ФОРМУЛА ЧЕБЫШЕВА: Wпп=3n -2pн -pв,
Где n – число подвижных звеньев механизма, рн – число низших КП, рв – число высших КП.
n=3
pн=4
рв=0
W=3.3-2.2=1
Рис.1.2.1
1.2.2 Пространственные механизмы.
В пространственном механизме оси непараллельны, звенья могут двигаться в разных плоскостях.
Wпр= 6n - (S1+ S2+ S3+ S4+ S5)
Допустим, что механизм, изображенный на рис.1.2.1 – пространственный и все кинематические пары 5-го класса, т.е. одноподвижны AV,BV,CV,DV, тогда
Wпр= 6n - (5pV+4pIV+3pIII+2pII+pI)
Wпр= 6.3 - 5.4 = -2 à статически неопределимая ферма.
Для получения Wдейств=0, необходимо добавить 3 движения.
q= Wдейств - Wпр = 1 - (-2) = 3,
где q – избыточные связи.
Для того чтобы их устранить, надо изменить класс некоторых кинематических пар, при этом нельзя изменять класс КП А. Поэтому, сделаем КП В – сферическим шарниром, т.е. 3-го класса (добавим 2 подвижности), а КП С – 4-го класса (добавим 1 подвижность). Тогда
Wпр= 6.3 - ( 5.2 + 4.1 + 3.1 ) = 18 - 17 = 1
n
ФОРМУЛА СОМОВА-МАЛЫШЕВА:Wпр= 6.n - ΣSi + q
i=1
§1.3 Кинематический анализ рычажных механизмов.
1.3.1 Основные понятия и определения.
Зависимость линейных координат в какой-либо точке механизма от обобщенной координаты – линейная функция положения данной точки в проекциях на соответствующие оси координат.
Хс= f(j1)
Зависимость угловой координаты какого-либо звена механизма от обобщенной координаты – угловая функция положения данного звена.
j2= f(j1)
Первая производная линейной функции положения точки по обобщенной координате – линейная передаточная функция данной точки в проекциях на соответствующие оси координат (иногда называют «аналог линейной скорости…»)


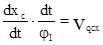






полная скорость т. С будет 
Первая производная угловой функции положения звена по обобщенной координате – передаточное отношение.

Вторая производная линейной функции положения по обобщенной координате – аналог линейного ускорения точки в проекциях на соответствующие оси.


Вторая производная угловой функции положения звена по обобщенной координате – аналог углового ускорения звена.
1.3.2 Аналитический способ определения кинематических параметров рычажных механизмов.
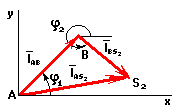
Дано: w1, lAB, lBS2, lBC, lAC
Определить: vi, ai, w2, e2.
Для исследования плоских рычажных механизмов для решения данной задачи целесообразно использовать метод проецирования векторного контура на оси координат.
Для определения функции положения точки С представим длины звеньев в виде векторов.
 Условие замкнутости данного контура:
Условие замкнутости данного контура:
 (1)
(1)
 (2)
(2)
 (3)
(3)
рис.1.3.2 из (3) следует, что
 (4)
(4)
Лекция 3.
Продифференцируем (3) по обобщенной координате:

 (5)
(5)
Продифференцируем (2) по обобщенной координате:

Если необходимо определить функции положения центра масс, то вы делим векторный контур ABS2
 Условие замкнутости данного векторного контура имеет вид:
Условие замкнутости данного векторного контура имеет вид:
 (6)
(6)
 (7)
(7)
Продифференцируем (7) по обобщенной координате и получим аналоги линейных скоростей точек S2 в проекциях на оси х и у:
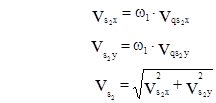 (9)
(9)
Глава 2. Анализ машинного агрегата.
В данной главе будут рассмотрены следующие вопросы:
1. Силы и моменты, действующие в машинном агрегате.
2. Переход от расчетных схем машинных агрегатов к динамическим моделям.
3. Расчет усилий в кинематических парах основного механизма рабочей машины.
4. Определение законов движения главного вала (входного звена) рабочей машины под действием приложенных сил и моментов при различных режимах работы машинного агрегата.
§2.1 Силы и моменты, действующие в машинном агрегате.
2.1.1 Движущиеся силы и моменты Fд и Мд.
 Работа движущих сил и моментов за цикл положительна: Ад>0.
Работа движущих сил и моментов за цикл положительна: Ад>0.
Цикл – промежуток времени, по истечению которого все кинематические параметры принимают первоначальное значение, а технологический процесс, происходящий в рабочей машине, начинает повторяться вновь.
2.1.2 Силы и моменты сопротивления (Fс,Mс).
Работа сил и моментов сопротивления за цикл отрицательна: Аc<0.
2.1.3 Силы тяжести (Gi).
Работа силы тяжести за цикл равна нулю: АGi=0.
2.1.4 Расчетные силы и моменты (ФSi,MФi).
ФSi,MФi – Главные векторы сил инерции и главные моменты от сил инерции.
2.1.5 Реакции в кинематических парах (Qij).
§2.2 Понятие о механических характеристиках.

Механическая характеристика 3-х фазного асинхронного двигателя.

Индикаторная диаграмма ДВС

H – ход поршня в поршневой машине
(расстояние между крайними
положениями поршня)

Индикаторная диаграмма насоса
Как правило, из паспорта известен диаметр поршня, по нему можно определить площадь Sп= p.d2/4, тогда сила: F=p.Sп
Правило знаков сил и моментов:
· Сила считается положительной, если она по направлению совпадает с направлением движения того звена, к которому эта сила приложена.
· Момент считается положительным, если его направление совпадает с направлением угловой скорости вращения данного звена.
Имея механическую характеристику поршневой машины и учитывая правило знаков, то можно перестроить в график сил (см. лабораторную работу №4).
Основной вывод:
В течение всего цикла работы поршневой машины сила, приложенная к поршню, будет изменяться как по величине, так и по направлению, это в свою очередь приводит к колебаниям угловой скорости главного вала рабочей машины.
§2.3 Понятие о расчетной схеме машинного агрегата и переход от нее к динамической модели.
На расчетной схеме машинного агрегата отмечают основные силовые факторы, действующие в машинном агрегате; основные массы звеньев, влияющих на закон движения машинного агрегата; и основные жесткости валов. На рис.5-92 показан переход от реальной схемы к расчетной схеме (а) и от нее к динамической модели.
Из множества масс выделены 3 основные, оказывающие самое большое внимание на закон движения.
Расчетная схема (б) – 3-х массовая динамическая модель.
Для описания закона движения 3-х массовой динамической модели необходимо 3 дифференциальных уравнения.
Если положить жесткость с1  , то можно перейти к двумассовой модели (необходимо 2 диф. уравнения).
, то можно перейти к двумассовой модели (необходимо 2 диф. уравнения).
Если положить жесткость с2 , то получим одномассовую динамическую модель (рис. 2.3).

Рис. 2.3
Можно иметь 2 вида одномассовых динамических моделей:
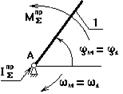
1. Если звено приведения совершает вращательное движение, то одномассовая модель имеет вид

закон движения должен быть один,
поэтому wм = w1 , jм = j1
Уравнение движения можно записать одним уравнением, в виде изменения кинетической энергии:


2.  Если звено приведения совершает поступательное движение, то одномассовая модель имеет вид:
Если звено приведения совершает поступательное движение, то одномассовая модель имеет вид:

Этот вид рассматривать не будем.
§2.4 Приведение сил и масс к одномассовой динамической модели.
 j1 – обобщенная координата.
j1 – обобщенная координата.
Нужно определить закон движения 1-го
звена данного механизма.
Дано: j1, w1, lAB, lBC, lBS2, G2, G3, F3, IS1, IS2.
Определить, как изменяется w1.
 |
При переходе от расчетной схеме к одномассовой механической модели за звено приведения, как правило, принимают то звено, закон движения которого определяют.
Звено приведения – зв.1; изобразим одномассовую модель:
2.4.1 Приведение масс.
При переходе от расчетной схемы к модели необходимо обеспечить равенство кинетической энергии звена приведенной модели и реального механизма:
ТМод = ТМех .
Кинетическая энергия модели должна быть равна кинетической энергии сего механизма.
Тмод = Тпост + Твращ
