|
|
Поняття про електронну систему. Класифікація сигналів в ЕС. Види ЕС.
Електронна система (ЕС) – це упорядкована сукупність взаємодіючих і взаємозв’язаних елементів або компонентів призначених для визначеної мети.
Прикладом електричних схем може бути як підсилювач, так і верстат з програмним керуванням, тобто ЕС бувають різної складності.
Складні ЕС будуються за ієрархічним принципом, вони можуть бути розбитими на підсистеми нижчого рівня ієрархії.
Найчастіше розбивка на підсистеми відбувається за функціональним призначенням, у цьому разі підсистеми називають функціональними блоками.
Системи описуються за допомогою структурних схем.
Класифікація сигналів:
1) Існують сигнали одновимірні і багатовимірні.
Приклад одновимірного сигналу: U(t)
Приклад багатовимірного сигналу: 
Багатовимірний сигнал – це упорядкована сукупність одновимірних сигналів.
Упорядкованість означає, що: 
2) Детерміновані та ймовірнісні:
Детермінованим називають сигнал, амплітуду якого можна визначити у будь-який момент часу, тобто він може бути описаний аналітично.
Наприклад: 
Значення ймовірнісних сигналів у будь-який момент часу можна визначити тільки з деякою ймовірністю.
Приклад таких некорисних ймовірнісних сигналів є шуми в електронній апаратурі.
Але шуми можуть нести і корисну інформацію. Наприклад: якщо радіотелескоп направити на космічний об’єкт, що випромінює радіохвилі, то з обробки отриманої інформації можна виявити властивості об’єкта.
3) Відеоімпульси і радіоімпульси:
Приклад відео імпульсу є сигнал:
Радіоімпульс:


 - фаза;
- фаза;
4) Дискретні, цифрові, аналогові сигнали:
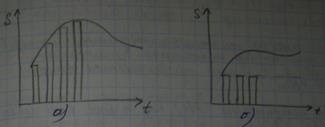
Дискретні сигнали:
Найпростіша модель дискретного сигналу, це відлікові значення сигналу S(t) в розрахунковій множені точок на осі часу.
Як правило інтервал дискретизації  вибирається однаковим.
вибирається однаковим.
Цифрові сигнали – це дискретні сигнали представлені в цифровій формі, наприклад: у вигляді чисел (кодів).
Аналоговий сигнал – це неперервний у часі сигнал, який може мати точки розриву.
Спочатку по каналам зв’язку передавались аналогові сигнали, тому що апаратура передатчиків і приймачів біла простішою.
Але у зв’язку з необхідністю передачі по каналу зв’язку одночасно багатьох сигналів із необхідністю підвищення швидкості передачі інформації по каналу, перейшли на цифрову передачу інформації по каналам зв’язку.
Інформація по каналам зв’язку може передавати сукупність імпульсів.
У цьому разі існують такі способи передачі сигн. аналогового сигналу в імпульсну форму.
Види електричних сигналів:
Електричні сигнали бувають:
- лінійні, не лінійні;
- без ЗЗ, і з ЗЗ;
- автоматизовані, автоматичні;
- автономні, не автономні;
- прямого, непрямого програмного керування.
1) Лінійні і не лінійні електричні системи:

Лінійною називається електронна система в якій функція відгуку E(U), що формується на виході лінійної системи, лінійно залежить від сигналу збудження, що надходить на вхід системи (теорія автоматичного керування).

 - постійний коефіцієнт;
- постійний коефіцієнт;
В реальності більшість лінійних систем є лінійними в обмежених діапазонах змінення вхідних і вихідних сигналів.
Прикладом такої системи є ОП.
Властивості лінійних систем:
1. В них діє принцип суперпозиції;
2. Система не породжує нових частот у вихідному сигналі.
Приклад: Якщо на вхід  , то на виході
, то на виході 
Тобто по відношенню до вхідних сигналів, вихідний сигнал має іншу амплітуду і зсунутий по фазі.
Робота нелінійної системи описується нелінійними рівняннями.
2) Системи без ЗЗ і зі зворотним зв’язком:
Зі ЗЗ:
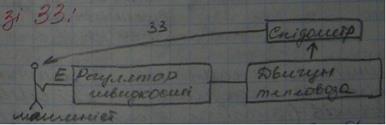
Структурна схема, що відображає рух тепловоза.
В даній системі машиніст є пристроєм порівняння, тобто він виконує функції компаратора (змінює положення ручки регулятора швидкості), тобто він видає сигнал Е, який є різницею між реальною швидкістю тепловоза, яку показує спідометрі бажаною швидкістю.
Тобто він формує сигнал розузгодження. Сигнал розузгодження формується у будь-якій системі за ЗЗ.
Недолік системи зі ЗЗ є: проблема їхньої стійкості, чого немає у системі без ЗЗ.
Без ЗЗ:
Термометр → індикатор
3) Автоматизовані, автоматичні системи:
Приклад автоматизованої системи це автоматизований робот. Він складається з людини оператора.

Блок сприйняття складається з датчиків і перетворювачів інформації, які обробляють інформацію датчиків (датчики фіксують стан зовнішнього середовища).
Блок виконавчого механізму може містити двигуни, чи інші механізм, що впливає на об’єкт керування.
В автоматичних електричних системах людина н впливає на їх роботу.
4) Автономні і не автономні системи:
Автономні системи є ідеальними моделями реальних систем. На них не впливає стан зовнішнього середовища.
Тому стан динамічної не автономної системи може бути визначений у будь-який момент часу, якщо заданий початковий момент часу  .
.
Параметри не автономної системи не змінюються.
В неавтономних системах відбувається вплив на їх роботу зовнішнього середовища від чого змінюються параметри системи.
Стан такої системи в момент часу t можна визначити з деякою ймовірністю, якщо заданий початковий момент часу , стан системи в момент .
5) Прямого, не прямого програмного керування:
В системах прямого керування виконавчий механізм діє на систему без стороннього джерела енергії.
Приклад: вимірювач кутової потужності

Чим більше  , шари рухаються в верх.
, шари рухаються в верх.
В системі прямого керування для змінення стану системи необхідне стороннє джерело енергії (сервомотор).
За програмою працює блок керування, який впливає на об’єкт керування.

17 Метод вузлових потенціалів. Методика формування рівнянь нелінійних електронних схем за МВП.
МВП дозволяє сформувати рівняння у неявному виді, які не розв’язані відносно першої похідної:

де - вектор потенціалів вузлів.
В МВП незалежними змінними є потенціали вузлів схеми і , де і – номер вузла, відносно загального вузла, потенціал якого дорівнює 0.
В основі МВП лежить перший закон Кіргхофа (сума струмів, що втікають і витікають з вузла, дорівнює 0):
АІг = 0 (1)
де А – матриця інциденцій, Іг- вектор струмів гілок схем.
Щоб знайти потенціал вузлів , треба вектор струмів Іг виразити через вузлові потенціали. Для цього використовують Ат і компонентні рівняння:

де в- вектор потенціалів вузлів; Uг – вектор падінь напруг на гілках схеми.
Розвязання систем нелінійних рівнянь сформованиї за МВП.
Розвязання систем виконується за допомогою знаходження потенціалів вузлів на кожному з кроків інтегрування. При цьому вся часова вісь розбивається на дискретні відрізки, що відповідають кожному з кроків інтегрування.
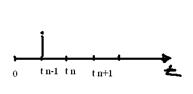
При цьому для знаходження потенціалів на n+1 кроці використовується інформація з n-го кроку. На кожному кроці інтегр. системи нелінійних рівнянь лініаризується за допомогою виконання ітераційних процедур.
Система інтегр.- диф. рівнянь. → За рахунок дискретизації часу. → Система нелінійних рівнянь → За рахунок ітераційних процедур → Система лінійних рівнянь.
На кожній m-ій ітерації виконуються наступні дії:
1)  - знаходиться вектор сумарних струмів вузлів; m- номер ітерації,
- знаходиться вектор сумарних струмів вузлів; m- номер ітерації,  - номер кроку інтегрування.
- номер кроку інтегрування.
2) Знаходиться матриця Якобі системи лінійних рівнянь: 
3) Розвязуються системи лінійних рівнянь відносно поправок потенціальних вузлів:

4)Знаходиться вектор 
5) Перевіряється умова на закінчення ітерацій: m – норма 
Якщо поправки < заданої точності  , то ітерації припиняються і система нелінійних рівнянь вважається розвязаною, то :
, то ітерації припиняються і система нелінійних рівнянь вважається розвязаною, то :