|
|
Таб 2.1. Расчётные формулы

В приведенной таблице использованы следующие обозначения:
Vsat ( Saturation voltage of the output switch) - напряжение насыщения выходного ключа, примерно составляет 0,7В для повышающего преобразователя и 1,3В для остальных схем и может быть уточнено по [9];
VF ( Forward voltage drop of the output rectifier) – прямое падение напряжения на импульсном диоде, примерно 0,4В для диода Шотки;
Vin ( Nominal input voltage) – номинальное значение входного напряжения, ранее по тексту U0;
Vin(min) – минимальное значение входного напряжения, ранее по тексту Ud;
Vout (Desired output voltage) – требуемое выходное напряжение, ранее по тексту Uн;
Iout ( Desired output current) - требуемый выходной ток, ранее по тексту Iн;
Vripple(pp) (Desired peak-to-peak output ripple voltage) – расчётное значение пульсации выходного напряжения от пика до пика;
Ipk(swilch) – пиковый ток выходного ключа;
ton – время пребывания выходного ключа в открытом состоянии;
toff – время пребывания выходного ключа в закрытом состоянии;
f – частота преобразователя;
CT – ёмкость времязадающего конденсатора;
CO - ёмкость выходного конденсатора;
RSC – величина токоизмерительного резистора;
L(min) – минимально допустимая величина индуктивности силового дросселя.
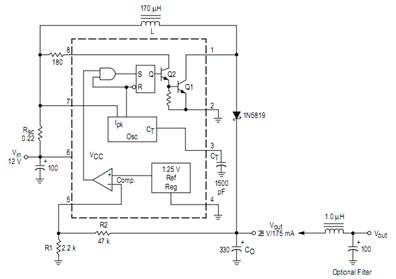
Рис 2.1. Повышающий преобразователь.

Рис. 2.2. Понижающий преобразователь.

Рис. 2.3. Инвертирующий преобразователь.
Перейдём теперь непосредственно к расчёту импульсного стабилизатора (в примере понижающий преобразователь), считая, что он питается от рассчитанного в задаче 1 выпрямителя:
з) ton / toff = (Vout + VF)/(Vin(min) - Vsat - Vout) = (Uн + VF)/( Ud - Vsat - Uн) = (5В +0,4В)/(8В – 1,3В – 5В) = 3,18.
и) Выберем частоту преобразователя. Рекомендуется:
f = 33 кГц, или ton + toff = 1/f = 30 мкс. Большая частота преобразования позволяет уменьшить величины дросселя и выходного конденсатора, но приводит к росту коммутационных потерь и некоторому снижению КПД. На меньшей частоте значительно увеличиваются габариты конденсатора и дросселя. При выборе частоты учитывают так же, влияние наводок от неё (и её гармоник) на питаемое и близко расположенные радиоэлектронные устройства;
к) toff = (ton + toff)/( ton / toff + 1) = 30 мкс/(3,18 + 1) = 7,18 мкс;
л) ton = (ton + toff) - toff = 30 мкс – 7,18 мкс = 22,82 мкс;
м) CT = 4.0 x 10–5 ton = 91,28 х 10-11 ≈ 910 пФ;
н) Ipk(swilch) = 2* Iout(max) = 2*Iн = 0,2 А, проверяем, что полученное значение меньше ISW, который для МС34063 равен 1,5 А. На это ток подмагничивания должен быть рассчитан дроссель, индуктивность которого определяем;
о) L(min) = (Vin(min) - Vsat - Vout)* ton(max)/ Ipk(swilch) = (8В – 1,3В – 5В)*22.82 мкс/0,2 А = = 194 мкГн, выбираем подходящий дроссель из каталога одного из доступных поставщиков, например [15]. Допустим RLB0608-221KL, но лучше с запасом по току RLB0812-221KL или RLB0912-471K (Дроссель - L=470uH +/-10%, Idc=0.3A, R=1.7 Ohm, Q=25@f=796kHz, SRF=2.9MHz, d=8.7mm, h=10mm, Rm=5mm, -20 to +80C, выводной с радиальными выводами);
п) RSC = 0,3 В/ Ipk(swilch) = 0,3 В/0,2 А = 1,5 Ом;
р) задаёмся Vripple(pp) = 20 мВ и находим
CO = Ipk(swilch)* (ton + toff)/(8* Vripple(pp)) = 0,2А*30 мкс/(8*20 мВ) = 37,5 мкФ, выбираем электролитический конденсатор 47 мкФ на 10В;
с) наконец (и самое главное) определим номинал резистора обратной связи R2, который и задаёт выходное напряжение. Из соотношения  получим:
получим:
R2 = (|Uн|/ 1,25 B - 1)*R1 = (5 В/1,25 В – 1) *1,2 кОм = 3,6 кОм. Выдерживать соотношение R2/R1 следует максимально точно, поэтому если нужного номинала нет в стандартном ряду, следует изменить R2;
т) выбираем импульсный диод по параметрам Ipk(swilch) = 0,2 A и UXX(max) = 19,5 B, вполне подходит 1N5817;
у) оценим КПД преобразователя, начнём с расчёта потерь в коммутирующих элементах и на питание схемы управления (в номинальном режиме):
потери на активном сопротивлении дросселя rL* Ipk(swilch)2/2 = 0,034 Вт,
потери выходного ключа Vsat* Ipk(swilch)* ton / (ton + toff)/2 = 0,099 Вт,
потери импульсного диода VF* Ipk(swilch)* toff / (ton + toff)/2 = 0,010 Вт, питание схемы управления ICC*U0 = 4 мА*9,41 В = 0,038 Вт,
делитель обратной связи Uн2/(R1 + R2) = 0,005 Вт.
Суммарные потери (без учёта потерь на фронтах импульсов) 0,186 Вт, а КПД = 5 В*0,1 А/(5 В*0,1 А + 0,186 Вт) ≈ 0,72 (≈72%);
ф) вычерчиваем схему рассчитанного стабилизатора

Рис. 2.4. Схема электрическая принципиальная рассчитанного импульсного стабилизатора (преобразователя) напряжения.
Практическое занятие №4.
Тема занятия: Расчет преобразователя сигнала датчика к стандартному интерфейсу 4-20 мА.
Цель занятия: Ознакомление с расчётом схем на операционных усилителях на примере преобразователя сигнала датчика к стандартному интерфейсу 4-20 мА.
На этом практическом занятии ознакомимся с:
- возможностью путём построения соответствующих цепей обратной связи получить от схемы усиления выходной сигнал нужного вида. В данном случае выходным сигналом будет потребляемый преобразователем ток;
- преобразованием сигналов датчиков самых разных физических величин к одному аналоговому интерфейсу, который широко используется в судовом и общепромышленном оборудовании;
- расчётом (на примере суммирующего усилителя) схем обработки сигналов на основе операционных усилителей;
- методами питания и подключения датчиков различных фирм;
- одним из способов введения схему преобразователя регулировок смещения нуля и коэффициента передачи.
Рис. 4.1. Схема электрическая принципиальная преобразователя.
Схема электрическая принципиальная рассчитываемого преобразователя приведена на рис. 4.1. На этом же рисунке показано включение датчика температуры для измерения как отрицательных (по Цельсию), так и положительных температур взятое из [23] (figure 7). В зависимости от варианта тип датчика и/или его подключение, как правило, потребуется изменить, взяв необходимые данные из справочных материалов, ссылки на которые в Интернете Вы найдёте в списке литературы.
Начнём с описания состава и назначения отдельных узлов схемы.
1) Узел питания состоит из интегрального регулируемого стабилизатора напряжения DA3 [17], необходимых для его работы и подавления высокочастотных помех в линии связи конденсаторов C1,C3 и делителя R7,R11, задающего выходное напряжение. Этот узел питает как датчик (через контакты подключения Х1 и Х4), так и операционный усилитель.
2) Выходной регулирующий элемент VT1 обеспечивает (под управлением операционным усилителем DA2), требуемый ток потребления схемы, который и является информационным сигналом интерфейса. Регулирующий элемент подключен, через токоограничивающий резистор R12, к выходу стабилизатора, хотя мог бы соединяться непосредственно с положительной клеммой интерфейса Х5. Такое решение позволяет использовать низковольтный транзистор и упрощает ограничитель тока до одного резистора, но требует увеличения допустимой мощности рассеяния стабилизатора.
3) Роль регулируемого токоизмерительного резистора для получения отрицательной обратной связи по потребляемому току играет цепочка R9, R13 и RP2. Изменение RP2 позволяет подстраивать коэффициент передачи на ±17% при расчётном значении токоизмерительного резистора Rт = R9 + R13/2 = 51 Ом. Показанное построение этой цепи связано с отсутствием достаточно надёжных и стабильных низкоомных подстроечных резисторов.
4) Резисторы R2-R6, R8, R10 и RP1 образуют входные цепи суммирующего операционного усилителя. R5, R6 задают рабочую точку (обычно половина напряжения питания при однополярном питании). R2, R8, R10 и RP1 обеспечивают его балансировку, причём с помощью RP1 можно регулировать смещение нуля. R3 и R4 входные резисторы устанавливающие требуемый коэффициент передачи сигнала с дифференциальных входов Х2 и Х3.
5) Конденсатор С2 задаёт быстродействие преобразователя и препятствует его самовозбуждению.
Дальше приводится расчёт преобразователя по следующим исходным данным:
- измеритель температуры в диапазоне -50..150°С;
- датчик LM35A.
При расчете и анализе работы схем на ОУ следует пользоваться следующими правилами:
· Напряжение между входами ОУ практически равно нулю;
· Входы ОУ практически не потребляют тока;
· Суммарная проводимость всех сопротивлений подключенных к инвертирующему входу (эквивалентное сопротивление источника сигнала) должна быть равна суммарной проводимости всех сопротивлений подключенных к неинвертирующему входу;
· В расчёте рабочей точки усилителя можно не учитывать входные резисторы (R3 и R4), если выполнено предыдущее правило.
Последнее правило ОБЯЗАТЕЛЬНО для суммирующего усилителя, использованного в данной схеме. Для других видов усилителей (например буферного усилителя) оно может быть не обязательным, но желательно для снижения погрешности.
Обозначим Rо эквивалентное сопротивление отрицательной обратной связи (последовательное соединение части RP1, R10 и параллельных частей RP2). А через Rс обозначим сопротивление смещения, эквивалент R2, R8 и другой части RP1. А через I0 ток интерфейса соответствующий нулевому сигналу на выходе датчика.
Тогда из приведенных правил можно вывести следующие соотношения:
Uсм = Uп R6/(R5 + R6) = (Uп + Rт I0) Rо/( Rо + Rс), 4.1
преобразовывая получим
 4.2
4.2
при R5 = R6 упрощается до  ; 4.3
; 4.3
 ; 4.4
; 4.4
Для дифференциального усилителя R3 = R4 и
 , 4.5
, 4.5
где  - изменение напряжения между клеммами Х2 и Х3 (сигнал с датчика),
- изменение напряжения между клеммами Х2 и Х3 (сигнал с датчика),
 - соответствующее изменение выходного тока.
- соответствующее изменение выходного тока.
Перейдём непосредственно к расчёту:
a) Выбор операционного усилителя (ОУ). По этому вопросу написаны тома литературы, но в наше время большую часть практических задач позволяет решить почти любой современный ОУ. В первую очередь обратите внимание на низковольтные ОУ с однополярным питанием. Они наиболее дешевы и имеют неплохие характеристики, например [19]. Не следует использовать несовершенные и дорогие классические ОУ кочующие из одного классического учебника в другой ещё с конца прошлого века. Не рекомендуется и ориентироваться на данные радиолюбительских сайтов. Можно посмотреть, что завозят на Украину солидные фирмы поставщики компонентов, их аналитики обычно отбирают лучшее. Поскольку в данной задаче потребление ОУ может оказаться критическим, а быстродействие не требуется (датчики в большинстве своём крайне инерционны) не нужно выбирать скоростные ОУ. ОУ с напряжением питания более 5В (например [20]) следует использовать, только если датчику необходимо большее напряжение питания. Если оценка погрешностей вносимых ОУ покажет его непригодность, используйте более точные (и дорогие) ОУ, например [21,22]. Приняв решение о замене ОУ, заново оцените погрешность и проверте допустимость потребления питания. Остальные пункты расчёта проверять не нужно. Помните, что датчики (кроме некоторых датчиков температуры) обычно дороги, и цена комплектующих преобразователя по сравнению с ними не велика. Предварительно выбираем ОУ AD8541 и напряжение питания Uп = 5В.
b) Проверяем допустимость суммарного потребления питания элементами схемы. Поскольку минимальная измеряемая величина должна соответствовать току потребления преобразователем 4 мА, общее потребление его узлов, при закрытом VT1, должно быть меньше этой величины.
- ток потребления DA3 (Adjustment Pin Current в его описании) = 100мкА;
- ток потребления ОУ (supply current) = 45 мкА;
- ток потребления его входных цепей ≈ Uп/(R2║ R5║ R6║R10) ≈ 5В/100кОм= 50 мкА;
- ток потребления датчика (Quiescent Current) 160 мкА;
- ток резистора R1 (смещение датчика) 50 мкА (см. figure 2 [23]).
Сумма ≈ 400 мкА, что много меньше 4 мА. Построение преобразователя возможно. Делая этот вывод нельзя забывать о цепочке R7 и R11. о них следующий пункт.
c) Расчет стабилизатора напряжения. Ток резистора R11 следует выбирать возможно большим. Это позволит снизить номинал R7, а значить и нестабильность напряжения на нём, которая возникает за счёт Adjustment Pin Current Change = 5 мкА. Напряжение питания равное напряжению на этом резисторе плюс 1,25В, в этой схеме выполняет функции опорного напряжения, а значит непосредственно сказывается на погрешности преобразователя. Выберем ток R11 несколько меньше чем 4мА-400 мкА, а именно 3 мА.
Тогда R11=1,25В/3 мА ≈ 430 Ом. R7=( Uп /1,25В – 1) R11 ≈ 1,3 кОм.
d) Токоограничительный резистор R12= Uп /20 мА = 250 Ом ≈ 240 Ом.
e) Выбираем рабочую точку ОУ (напряжение на его входах при нулевом сигнале с датчика) равной половине питания. Тогда R2 = R6. Номинал этих резисторов должен быть достаточно велик, чтобы не нагружать датчик и не потреблять излишний ток от источника питания. В то же время чрезмерные резисторы увеличивают погрешности, вызванные входным током ОУ. В старой литературе рекомендовалось выбирать их, исходя из нагрузочной способности ОУ. Совет совершенно неприемлемый для современных ОУ, имеющих очень малые входные токи. Можно выбрать резисторы так, чтобы погрешности от дрейфа смещения нуля по напряжению и дрейфа входного тока примерно совпадали.
R2 ≈ Offset Voltage Drift/Offset Current Drift = (4 μV/°C)/(25 fA/°C) = 160 МОм. Такой номинал слишком велик, что может вызвать увеличение погрешностей из за утечек по загрязнениям монтажной платы и теплового шума резисторов. Выберем R2 = R6 = 100кОм.
f) Обозначим Ин, Ив и И0, соответственно нижний, верхний пределы измеряемой величины и значение измеряемой величины при котором напряжение на дифференциальном выходе датчика равно нулю. Значение И0 может лежать вне рабочего диапазона, и даже быть физически недостижимым (получается экстраполяцией характеристики датчика). В расчётном примере Ин = -50, Ив = 150 и И0 = 0.
I0 = 4 мА + 16 мА * (И0 - Ин)/ (Ив - Ин) = 8 мА.
Замечание: I0 может лежать вне диапазона 4-20 мА и даже быть отрицательной величиной. Для недифференциальных датчиков И0 равно значению измеряемой величины, напряжение соответствующее которой подано на клемму Х2.
g) Учитывая, что R5 = R6 и помножив обе части формулы 4.4 на Rс получим
 . Подставляем в это выражение формулу 4.3, тогда
. Подставляем в это выражение формулу 4.3, тогда
 и наконец (разделив на 2 и умножив на R6)
и наконец (разделив на 2 и умножив на R6)
 =100кОм
=100кОм  =108 кОм.
=108 кОм.
Выбираем R10, которое составляет большую часть Rс, R10 = R6 = 100 кОм и получим (при среднем положении движка RP1) RP1 = 2(Rс – R10) = 16 кОм.
h) Из 4.3 находим
 =
=
= 108 кОм  = 92,85 кОм.
= 92,85 кОм.
R8 =  = 662 кОм ≈ 680 кОм.
= 662 кОм ≈ 680 кОм.
i) Рассчитаем входные резисторы:
= 20 мА – 4 мА = 16 мА;
= k(Ив - Ин),
где k = 10,0 mV/˚C – чувствительность датчика (Sensor Gain).
Из 4.5 имеем R3 = R4 = Rо k(Ив - Ин)/( Rт*16 мА) = 227 кОм ≈ 220 кОм.
j) Постоянная времени усилителя C2R5/2 = 5 мс, что много меньше постоянной времени датчика (2 с при высокой скорости обдува). С другой стороны полоса пропускания ОУ (Wide bandwidth) 1 МГц, что много выше полосы пропускания преобразователя, заданной С2. Значить самовозбуждения схемы можно не опасаться. (Современные ОУ имеют внутреннюю коррекцию, препятствующую их самовозбуждению, но на неё можно полагаться, только если не дополнять ОУ добавочными каскадами, которым в нашем случае является VT1.)
k) Оценим погрешность, вносимую преобразователем. Влияние напряжения смещения ОУ и входного тока компенсируется при балансировке преобразователя с помощью RP1. Сравнивая данные из [19] и [23] видим, что шум ОУ на порядок меньше шума датчика, а значить его можно не учитывать. Согласно пункту е) резисторы выбраны много меньше тех, при которых оказывает влияние дрейф входного тока. Остался дрейф напряжения смещения ОУ во времени и при изменении температуры. По первому фактору данных нет, оценим второй. В рабочем диапазоне температур от -20°С до +55°С (согласно требований Регистра) дрейф составит 4 мкВ/°С*(55°С+20°С) = 300 мкВ. Это соответствует ошибке в измеряемой величине (температуре датчика) ∆Т = 300 мкВ / k = 0,03°С, что заметно меньше погрешности собственно датчика, которая составляет не менее 0,1°С. Таким образом ОУ выбран правильно.
l) Все резисторы, кроме R1, R12, RP1 и RP2, должны быть прецизионными. Желательно (но не обязательно) оценить ошибку, возникающую при отклонении резисторов от номинала.