|
|
Управление координатами в электроприводе переменного тока с фазным ротором.
Управление координатами в электроприводе переменного тока с фазным ротором.
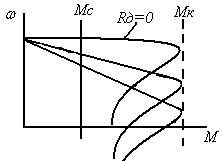
управление производится путем переключения сопротивлений в цепи ротора с помощью релейно-контакторных схем:
Увеличение сопротивления в цепи ротора двигателя приводит к увеличению критического скольжения  двигателя, скорость холостого хода и
двигателя, скорость холостого хода и  не изменяются.
не изменяются.
 Преимущества: широкий диапазон регулирования, простота реализации, возможность получения большого пускового момента, равного критическому.
Преимущества: широкий диапазон регулирования, простота реализации, возможность получения большого пускового момента, равного критическому.
Недостатки: потери электроэнергии (  ), ступенчатость регулирования, малая точность регулирования скорости из-за снижения жесткости механической характеристики.
), ступенчатость регулирования, малая точность регулирования скорости из-за снижения жесткости механической характеристики.
Расчет сопротивлений добавочных резисторов:
· по справочным данным рассчитывается сопротивление фазы ротора двигателя:  , где:
, где:  - ЭДС заторможенного ротора;
- ЭДС заторможенного ротора;  - номинальное скольжение двигателя;
- номинальное скольжение двигателя;  - номинальный ток ротора;
- номинальный ток ротора;
· рассчитывается требуемое искусственное скольжение исходя из количества требуемых скоростей:  ;
;
· расчет сопротивления на данной ступени: 
· если требуется, чтобы при пуске был максимальный момент, то суммарное добавочное сопротивление в цепи ротора определяют по формуле:  , где:
, где:  - критическое скольжение;
- критическое скольжение;  - индуктивное сопротивление короткого замыкания.
- индуктивное сопротивление короткого замыкания.
Методы повышения эффективности управления координатами асинхронного двигателя с фазным ротором:
· для уменьшения потерь электроэнергии в цепи ротора применяют каскадные схемы управления (рис. 1): в этих схемах ток ротора выпрямляется, преобразуется инвертором в переменный и возвращается в сеть. Также применяется вариант (рис. 2), когда после выпрямления ток ротора подается на якорь двигателя постоянного тока, который повышает момент электропривода на малой скорости:
1)  2)
2) 
·  для уменьшения ступенчатости регулирования применяется ШИМ с помощью электронных ключей на транзисторах и тиристорах:
для уменьшения ступенчатости регулирования применяется ШИМ с помощью электронных ключей на транзисторах и тиристорах:
При замыкании электронного ключа сопротивление цепи ротора уменьшается и скорость увеличивается. Для плавной регулировки скорости электронный ключ работает в ШИМ. Реактор L уменьшает ЭДС самоиндукции и пульсации тока;
·  для повышения точности регулирования и жесткости механической характеристики применяется электропривод с машиной двойного питания. При таком питании скорость вращения ротора пропорциональна разности частот:
для повышения точности регулирования и жесткости механической характеристики применяется электропривод с машиной двойного питания. При таком питании скорость вращения ротора пропорциональна разности частот: 
Преимуществами такой схемы являются получение абсолютно жестких механических характеристик как у синхронного двигателя:

В данной схеме требуется меньшая мощность преобразователя частоты при такой же мощности двигателя, по сравнению с АД с короткозамкнутым ротором.