|
|
Управление координатами в системе преобразователь (источник ЭДС) – двигатель постоянного тока.
Скорость и момент двигателя изменяются за счет изменения ЭДС преобразователя.
На практике применяются транзисторные и тиристорные преобразователи, а также система генератор-двигатель. При этом ЭДС меняется плавно по определенному закону (чаще всего, линейному), чтобы ограничить ток и момент двигателя.
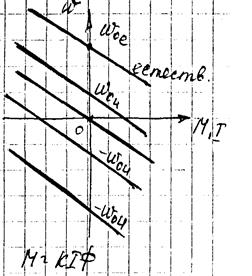 При изменении Еп, искусственные характеристики перемещаются параллельно естественной.
При изменении Еп, искусственные характеристики перемещаются параллельно естественной.
Преимущества:
1. высокая точность регулирования т. к. жесткость мех. характеристики остается const.
2. высокое быстродействие, т. к. Тя ≤≤ Тв
3. плавность регулирования скорости и момента
4. малые потери энергии и высокий КПД, т.к. КПД электронного преобразователя
ηп=0,95-0,97.
Недостатки:
1. сложность и большая стоимость преобразователя.
Управление координатами посредствам формирования зависимости еп(t).
Предположим, что Тп=0; Тя=0 для упрашения, а мех. характеристика линейна.
 Где: β - жесткость:
Где: β - жесткость: 
Требуется получить динамические мех. Характеристики, которые определяют соответствие между скоростью и моментом двигателя в переходных процессах, в зависимости от характера изменения ЭДС преобразователя якоря.
В системе ген-двиг. постоянная времени преобразователя определяется, в основном постоянной времени цепи возбуждения генератора

Lвг – индуктивность ОВ генератора
Rвг – активное сопротивление ОВ генератора
Функциональная схема системы двигатель-генератор
УВ – управляемый выпрямитель
АД – асинхронный двигатель
G- генератор постоянного тока
М – двигатель постоянного тока
Ротор генератора вращается асинхронным двигателем
Быстродействие системы ограничевается инертностью цепи возбуждения генератора

При изменении вх. сигнала Uвх., изменяется ток возбуждения и ЭДС генератора, и затем скорость двигателя.
Преимущества системы: большая мощность
Недостатки: малый КПД и срок службы, (надежность)
