|
|
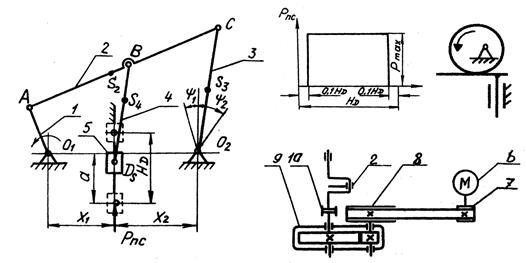
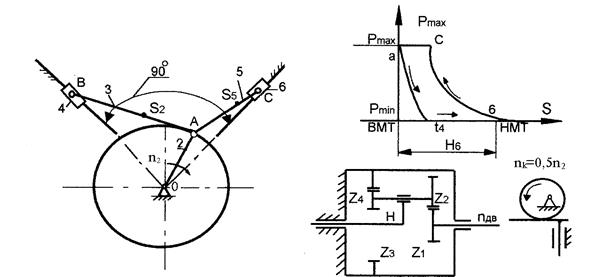
Механізм дозувального пристрою.
Механізм призначений для дозування різних сипкових речовин. Основним механізмом є шостиланковий важільний механізм. Повзун 6 вчиняє зворотно - поступальний рух і здійснює дозування при кожному обертанні кривошипу 2. Повзун 6 за допомогою шатуна 5 зв’язаний з шатуном 3 кривошипно - коромислового чотириланкового механізму.
Обертання колінчатого вала здійснюється від електродвигуна через пасову передачу та одноступінчатий циліндричний редуктор. Вихідний вал редуктора з’єднаний з колінчатим валом за допомогою компенсованої муфти. На рисунку наведена діаграма сил корисного опору.
Подача сипкового матеріалу до розподільної камери здійснюється кулачковим механізмом із штовхачем та роликом. Кутові швидкості кулачка і кривошипа однакові.
У завданні передбачається необхідність метричного синтезу механізму за завданими крайніми положеннями коромисла і вихідної ланки - повзуна.
Завдання 2, 3
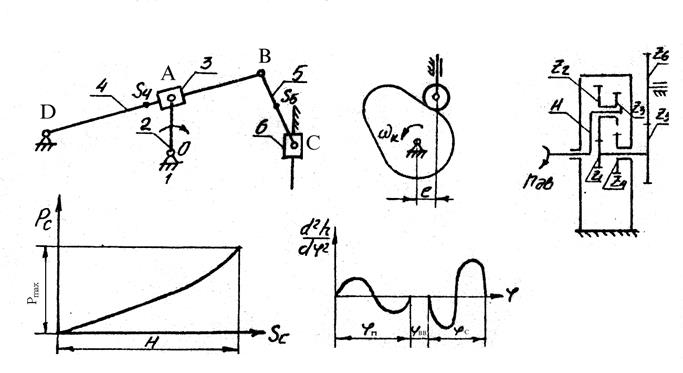
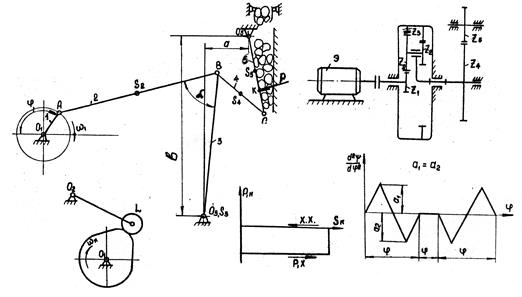
Брикетувальний автомат
Автомат призначений для формування брикетів та виштовхування їх з форми. Основним механізмом є важільний. Кривошип 2 за допомогою каменю 3 призводить у коливальний рух кулісу 4. Куліса через шатун 5 зв’язана з вихідною ланкою - повзуном 6, в якому міститься штамп, що формує брикет.
Привід кривошипа 2 здійснюється через зубчастий механізм, що вміщує у собі планетарну передачу.
Під час руху повзуна до низу на нього діє змінна за величиною сила виробничого опору, яка досягає максимуму у крайньому положенні.
Виштовхування брикету з форми здійснюється за допомогою кулачкового механізму. Динамічний синтез кулачкового механізму слід проводити за заданим кутом тиснення кулачка і діаграмою змінювання аналога пришвидшення штовхача. Кутова швидкість кривошипу і кулачка однакові.
Завдання на курсовий проект за цією темою приводиться у двох варіантах: із заданими геометричними параметрами важільного механізму (Завдання 2) і з кінематичним синтезом цього механізму за заданим коефіцієнтом змінювання середньої швидкості вихідногї ланки та умовою прокручування кривошипу (Завдання 3).
Завдання 4
Машина для рубання капусти
Основним механізмом є шостиланковий важільний механізм. При обертанні кривошипу 2 куліса 4 здійснює коливальний рух. Зв’язаний з кулісою за допомогою шатуна 5 повзун 6 із закріпленим на ньому ножем виконує зворотньо - поступальний рух та проводить рубання капусти. Робочий хід ножа - справа наліво.
Діаграма зусиль різання під час переміщення вантажу подана на схемі.
Обертання колінчастого вала здійснюється від електродвигуна через пружну муфту, зубчастий редуктор та компенсувальну муфту.
Кулачковий механізм з коромислом подає продукт до загрузочної камери.
Завдання 5
Місильна машина
Машина призначена для перемішування в’язких речовин. Основним механізмом мішалки є кривошипно - коромисловий. Виконавча ланка - мішалка - жорстко зв’язана з шатуном.
Під час роботи механізму мішалка, здійснюючи складний плоско - паралельний рух, перемішує речовину, що міститься в обертальній чаші.
Колінчастий вал - кривошип - призводиться до обертання електродвигуном через пружну муфту, двохступінчастий циліндричний редуктор та компенсувальну муфту.
Силу корисного опору слід вважати постійною, прикласти у точці С й спрямувати у протилежному напрямку відносно швидкості точки С.
Кулачковий механізм використовується у приводі траверси, що виймає лопасть мішалки з дежі.
Завдання 6
Двоступінчастий компресор
Основний важільний механізм компресора містить у собі дві шатуно - повзунні групи. Напрямні двох поршнів (повзунів) - взаємно перпендикулярні.
Перший лівий механізм за допомогою повзуна 4 всмоктує повітря при атмосферному тиску і стискує його (ділянка ав на індикаторній діаграмі) до максимального тиску першого ступеня Рmax. (ділянка вс на індикаторній діаграмі) та виштовхує його при цьому тиску у ресивер (ділянка сd). Під час зворотнього перебігу поршня відбувається розширення залишкової у мертвому просторі порції повітря ( ділянка bа індикаторної діаграми).
У другому циліндрі початковим мінімальним є тиск Рmax всмоктування - максимальний тиск першого ступеня. За один цикл роботи він підвищується ще у два рази.
Зусилля на поршні визначається з формули 
де pі - тиск у циліндрі, відповідний і-тому положенню поршня;
d - діаметр циліндра.
Кулачковий механізм з плоским штовхачем приводить у рух масляний насос. Синтез кулачкового механізму виконується за заданим законом зміни аналога пришвидшення S''- f(j) у функції кута повороту. У привід масляного насоса, окрім кулачкового, входять і зубчасті передачі з рухомими і нерухомими осями.
Завдання 7
Щокова дробарка
Щокова дробарка використовується для подрібнення матеріалу через роздушення у сполученні з розкочуванням та згином між нерухомою та рухомою (ланка 5) щоками.
Подрібнений матеріал висипається між щоками у регульовану шпару.
У розглянутій конструкції привід вала кривошипу приводиться в обертання від електродвигуна через пасову передачу і циліндричний редуктор. Редуктор з’єднується з валом кривошипа за допомогою жорсткої компенсувальної муфти, а вал електродвигуна з редуктором - пружною муфтою.
Кулачковий механізм подає матеріал до загрузочної камери.
Завдання 8
Механізм для виробів з порошку
Електродвигун через планетарний редуктор і зубчасту передачу з нерухомими осями коліс приводить до обертання колінчастий вал 1. Від колінчастого вала рух передається повзуну 5 преса через ланки 2, 3, 4. Пресування здійснюється пуансоном повзуна 5 наприкінці робочого ходу повзуна, його руху вниз.
Скидання від пресованої деталі з робочого столу преса та установлення нової порції порошку здійснюють при зворотному ході повзуна коромислом кулачкового механізму. Вал кулачка має з кривошипом однакову кількість обертання. Прямий хід коромисла забезпечує заповнення порошком матриці з відповідного завантажного пристрою.
Початок руху коромисла повинен співпадати за часом з моментом закінчення ходу повзуна донизу.
Додаток 1
| ХАРКІВСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ ХАРЧУВАННЯ ТА ТОРГІВЛІ | |
| Завдання 1 Механізм дозувального пристрою | Кафедра механіки та графіки |
| Пара- | Один. | Варіант числових значень | |||||||||
| метр | виміру | ||||||||||
| X1 | мм | ||||||||||
| Х2 | мм | ||||||||||
| a | мм | ||||||||||
| lO2C | мм | ||||||||||
| lO2S3 | мм | ||||||||||
| l | LAS2/LAC=LDS4/LDB=0,5 | ||||||||||
| y1 | град | ||||||||||
| y2 | град | ||||||||||
| m2 | кг | 6,5 | 7,8 | 8,4 | 9,4 | 9,6 | |||||
| m3 | кг | 4,8 | 5,5 | ||||||||
| m4 | кг | ||||||||||
| m5 | кг | ||||||||||
| JS2 | кгм2 | 0,5 | 0,5 | 0,7 | 0,6 | 0,6 | 0,7 | 0,7 | 0,8 | 0,9 | 0,8 |
| JS3 | кгм2 | 0,3 | 0,4 | 0,4 | 0,4 | 0,45 | 0,4 | 0,50 | 0,45 | 0,55 | 0,5 |
| JS4 | кгм2 | 0,5 | 0,5 | 0,7 | 0,6 | 0,6 | 0,7 | 0,7 | 0,8 | 0,9 | 0,8 |
| Pmax | H | ||||||||||
| n | об/хв | ||||||||||
| z1 | |||||||||||
| jП=jС | град | ||||||||||
| jВВ | град | ||||||||||
| h | мм | ||||||||||
| N | - |
Продовження додатку 1
| ХАРКІВСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ ХАРЧУВАННЯ ТА ТОРГІВЛІ | |
| Завдання 2 Брикетувальний автомат | Кафедра механіки та графіки |

| Пара- | Один. | Варіант | Пара- | Один. | Варіант | ||||||||||
| метр | виміру | метр | виміру | ||||||||||||
| n1 | об/хв | IS4 | кг.м2 | 0,04 | 0,038 | 0,04 | 0,042 | 0,04 | 0,04 | ||||||
| lOA | м | 0,075 | 0,10 | 0, 05 | 0,13 | 0,10 | 0,11 | IS5 | кг.м2 | 0,001 | 0,001 | 0,001 | 0,001 | 0,001 | 0,001 |
| lВД | м | 0,375 | 0,440 | 0,37 | 0,56 | 0,45 | 0,52 | Pm | кН | ||||||
| lВС | м | 0,15 | 0,175 | 0,18 | 0,19 | 0,17 | 0,20 | z1 | - | ||||||
| lВS3 | м | 0,20 | 0,22 | 0,185 | 0,28 | 0,225 | 0,26 | z2 | - | ||||||
| lBS5 | м | 0,075 | 0,100 | 0,09 | 0,095 | 0,085 | 0,100 | z2’ | - | ||||||
| yД | м | z3 | - | ||||||||||||
| xД | м | -0,19 | -0,25 | -0,16 | -0,30 | -0,22 | -0,25 | z4 | - | ||||||
| xC | м | 0,18 | 0,21 | 0,20 | 0,23 | 0,20 | 0,21 | m | мм | ||||||
| m3 | кг | h | м | 0,025 | 0,025 | 0,03 | 0,03 | 0,03 | 0,025 | ||||||
| m4 | кг | jn | град | ||||||||||||
| m5 | кг | jC | град | ||||||||||||
| m6 | кг | jВВ | град | ||||||||||||
| IS3 | кг.м2 | 0,002 | 0,002 | 0,002 | 0,002 | 0,002 | 0,002 | [d] | град | ||||||
| dдоп | 0,1 | 0,1 | 0,12 | 0,12 | 0,09 | 0,09 |
Продовження додатку 1
| ХАРКІВСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ ХАРЧУВАННЯ ТА ТОРГІВЛІ | |
| Завдання 3 Брикетувальний автомат | Кафедра механіки та графіки |
 |

| Пара- | Один. | Варіант | Пара- | Один. | Варіант | ||||||||||
| метр | виміру | метр | виміру | ||||||||||||
| nд | об/хв | z2 | - | ||||||||||||
| n1 | об/хв | z2’ | - | ||||||||||||
| lAO | м | 0,085 | 0,09 | 0,082 | 0,085 | 0,10 | 0,09 | z3 | - | ||||||
| lАВ | м | 0,283 | 0,281 | 0,235 | 0,256 | 0,293 | 0,256 | z4 | - | ||||||
| lAS2 | м | 0,094 | 0,094 | 0,078 | 0,085 | 0,098 | 0,085 | m | мм | ||||||
| xb=e | м | 0,013 | 0,018 | 0,016 | 0,021 | 0,026 | 0,024 | N | - | ||||||
| H | м | 0,17 | 0,18 | 0,165 | 0,17 | 0,20 | 0,18 | h | м | 0,03 | 0,04 | 0,038 | 0,03 | 0,035 | 0,04 |
| m2 | кг | jn | град | ||||||||||||
| m3 | кг | jC | град | ||||||||||||
| IS2 | кг.м2 | 0,0045 | 0,005 | 0,0055 | 0,006 | 0,0065 | 0,007 | jBB | град | ||||||
| Pm | кН | 8,84 | 9,35 | 9,86 | 10,2 | 10,7 | 11,6 | [d] | град | ||||||
| z1 | - | dдоп | - | 0,1 | 0,11 | 0,12 | 0,09 | 0,08 | 0,1 |
Продовження додатку 1
| ХАРКІВСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ ХАРЧУВАННЯ ТА ТОРГІВЛІ | |
| Завдання 4 Машина для рубання капусти | Кафедра механіки та графіки |
  | |||
 | |||

| |
|
|
|
| Пара- | Один. | Варіант числових значень | |||||||||
| метр | виміру | ||||||||||
| n2 | об/хв | ||||||||||
| LO1A | мм | ||||||||||
| LO1B | мм | ||||||||||
| LBC | мм | ||||||||||
| LDC | мм | ||||||||||
| l | мм | ||||||||||
| L | мм | LBS4=0,3L01B; LCS5=0,5CD; LBK=(LO1B+LO1A)1,1 | |||||||||
| LCS5 | мм | 0,5×CD | |||||||||
| Pmax | Н | ||||||||||
| m4 | кг | ||||||||||
| m5 | кг | ||||||||||
| m6 | кг | ||||||||||
| JSi | кгм2 | JS4=0,1×m4×L2BK; JS5= m5×L2CD/8 | |||||||||
| dдоп | 0,1 | 0,11 | 0,12 | 0,09 | 0,1 | 0,08 | 0,11 | 0,12 | 0,1 | 0,11 | |
| jП | град. | ||||||||||
| jВВ | град. | ||||||||||
| jС | град. | ||||||||||
| [d] | град. | ||||||||||
| Dymax | град. | ||||||||||
| LO2E | |||||||||||
| N |
Продовження додатку 1
| ХАРКІВСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ ХАРЧУВАННЯ ТА ТОРГІВЛІ | |
| Завдання 5 Місильна машина | Кафедра механіки та графіки |

| Пара- | Один. | Варіант числових значень | |||||||||
| метр | виміру | ||||||||||
| n2 | об/хв | ||||||||||
| l02A | мм | ||||||||||
| lAB | мм | ||||||||||
| lB02 | мм | ||||||||||
| X02 | мм | ||||||||||
| Y02 | мм | ||||||||||
| lAC | мм | ||||||||||
| l | l02S4/lBO2=lAS3/lAC=0,5 | ||||||||||
| m3 | кг | ||||||||||
| m4 | кг | 9,5 | 8,5 | 7,3 | 7,5 | ||||||
| JS3 | кгм2 | 6,2 | 6,5 | 5,5 | 5,8 | ||||||
| JS4 | кгм2 | 0,16 | 0,15 | 0,1 | 0,09 | 0,18 | 0,2 | 0,13 | 0.06 | 0,07 | 0,08 |
| Pmax | Н | ||||||||||
| Z1 | |||||||||||
| Z2 | |||||||||||
| jп | град | ||||||||||
| jС | град | ||||||||||
| jBB | град | ||||||||||
| h | мм | ||||||||||
| dдоп | 0,09 | 0,08 | 0,1 | 0,11 | 0,12 | 0,09 | 0,08 | 0,1 | 0,11 | 0,12 | |
| N |
Продовження додатку 1
| ХАРКІВСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ ХАРЧУВАННЯ ТА ТОРГІВЛІ | |
| Завдання 6 Двохступінчастий компресор | Кафедра механіки та графіки |
| Пара- | Один. | Варіант числових значень | |||||
| метр | виміру | ||||||
| Vсер. | м/с | 4,2 | 4,3 | 4,4 | 4,5 | 4,6 | 4,7 |
| n2 | об/хв | ||||||
| LАВ/LАО | 4,1 | 3,5 | 3,4 | 3,8 | 3,7 | ||
| LAS3=LAS5 | 0.3L | ||||||
| d4 | мм | ||||||
| d6 | мм | ||||||
| m3=m5 | кг | 13,5 | 12,5 | 12,5 | |||
| m4 | кг | 11,5 | 10,5 | 10,5 | |||
| m6 | кг | 6,5 | 6,5 | 5,5 | |||
| JS3=JS5 | кг×м2 | 0,32 | 0,31 | 0,3 | 0,3 | 0,3 | 0,28 |
| J2 | кг×м2 | 12.5 | 12.5 | ||||
| р4max | Н/мм2 | ||||||
| р6max | Н/мм2 | ||||||
| р4min | Н/мм2 | 0,1p6max | |||||
| р6min | Н/мм2 | 0.95p4max | |||||
| d3,4=d5,6 | мм | ||||||
| jп=jс | град | ||||||
| jВВ | град | ||||||
| h | мм | ||||||
| dдоп | 0,08 | 0,09 | 0,1 | 0,1 | 0,11 | 0,12 | |
| i1H | 4,1 | 4,2 | 4,4 | 4,5 | |||
| Z5 | |||||||
| Z6 | |||||||
| N |
Продовження додатку 1
| ХАРКІВСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ ХАРЧУВАННЯ ТА ТОРГІВЛІ | |
| Завдання 7 Щокова дробарка | Кафедра механіки та графіки |
|
| Параметр | Один. | Варіант числових значень | |||||||
| виміру | |||||||||
| n1 | об/хв. | ||||||||
| kV | - | 1,06 | 1,05 | 1,06 | 1,07 | 1,08 | 0,04 | 1,09 | 1,07 |
| a0 | град | ||||||||
| b | град | ||||||||
| LBO3 | м | 0,35 | 0,4 | 0,45 | 0,5 | 0,45 | 0,4 | 0,35 | 0,55 |
| LBC | м | 0,08 | 0,09 | 0,1 | 0,11 | 0,1 | 0,14 | 0,15 | 0,12 |
| LCO5 | м | 0,5 | 0,55 | 0,6 | 0,7 | 0,7 | 0,65 | 0,75 | 0,6 |
| LO1A=a | м | 0,06 | 0,07 | 0,08 | 0,09 | 0,09 | 0,1 | 0,07 | 0,06 |
| c=b | м | 0,7 | 0,8 | 0,9 | 1,0 | 0,9 | 0,7 | 0,8 | 1,0 |
| LAS2/LAB | - | 0,5 | 0,25 | 0,35 | 0,35 | 0,5 | 0,4 | 0,3 | 0,33 |
| LO5S5/LO5C | - | 0,5 | 0,75 | 0,77 | 0,5 | 0,5 | 0,6 | 0,5 | 0,7 |
| m2=m3 | кг | ||||||||
| m5 | кг | ||||||||
| JS2 | кг м2 | 0,018 | 0,027 | 0,039 | 0,053 | 0,039 | 0,04 | 0,025 | 0,017 |
| JS3 | кг м2 | 0,073 | 0,108 | 0,155 | 0,212 | 0,156 | 0,17 | 0,178 | 0,145 |
| JS5 | кг м2 | 0,297 | 0,411 | 0,612 | 0,832 | 0,832 | 0,741 | 0,523 | 0,35 |
| Jпр. | кг м2 | 0,53 | 0,58 | 0,65 | 0,7 | 0,65 | 0,55 | 0,54 | 0,63 |
| P | Н | ||||||||
| dдоп. | - | 0,04 | 0,033 | 0,05 | 0,033 | 0,05 | 0,04 | 0,05 | 0,033 |
| LO2E | м | 0,08 | 0,07 | 0,06 | 0,07 | 0,08 | 0,09 | 0,1 | 0,06 |
| Dy | град | ||||||||
| jп=jс | град | ||||||||
| [d] | град | ||||||||
| jВВ | град |
Закінчення додатку 1
| ХАРКІВСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ ХАРЧУВАННЯ ТА ТОРГІВЛІ | |
| Завдання 8 Механізм для виробів з порошку | Кафедра механіки та графіки |
 | |||||||
 | |||||||
 | |||||||
 | |||||||

| |
 | |||||||||
 | |||||||||
 | |||||||||
 | |||||||||
 | |||||||||




|




|
|
|
| Пара- | Один. | Варіант | Пара- | Один. | Варіант | |||||||||||
| метр | виміру | метр | виміру | |||||||||||||
| nд | об/хв | JS3 | кг.м2 | 0,005 | 0,005 | 0,005 | 0,005 | 0,005 | 0,005 | |||||||
| n1 | об/хв | JS4 | кг.м2 | 0,005 | 0,004 | 0,006 | 0,006 | 0,006 | 0,005 | |||||||
| lOA | м | 0,037 | 0,037 | 0,050 | 0,046 | 0,049 | 0,044 | Pmax | кН | 4,2 | 4,6 | 5,0 | 4,2 | 4,6 | 4,6 | |
| lАВ | м | 0,190 | 0,178 | 0,178 | 0,188 | 0,151 | 0,171 | z1 | - | |||||||
| lВД | м | 0,17 | 0,165 | 0,190 | 0,180 | 0,185 | 0,175 | z2 | - | |||||||
| lВС | м | 0,17 | 0,165 | 0,190 | 0,180 | 0,185 | 0,175 | z2 | - | |||||||
| xД | м | -0,25 | -0,24 | -0,24 | -0,25 | -0,22 | -0,235 | z3 | - | |||||||
| yД | м | 0,172 | 0,146 | 0,172 | 0,149 | 0,155 | 0,161 | z4 | - | |||||||
| xC | м | -0,25 | -0,24 | -0,24 | -0,25 | -0,22 | -0,235 | m | мм | |||||||
| lAS2 | м | 0,063 | 0,05 | 0,05 | 0,06 | 0,04 | 0,05 | N | - | |||||||
| lBS3 | м | 0,085 | 0,0825 | 0,095 | 0,09 | 0,0925 | 0,0875 | lO2E | м | 0,10 | 0,12 | 0,10 | 0,11 | 0,12 | 0,11 | |
| lВS4 | м | 0,085 | 0,0825 | 0,095 | 0,09 | 0,0925 | 0,0875 | Dym | град | |||||||
| m2 | кг | jn | град | |||||||||||||
| m3 | кг | jC | град | |||||||||||||
| m4 | кг | jBB | град | |||||||||||||
| m5 | кг | [d] | град | |||||||||||||
| JS2 | кг.м2 | 0,002 | 0,002 | 0,002 | 0,002 | 0,002 | 0,002 | dдоп. | 0,1 | 0,09 | 0,12 | 0,11 | 0,08 | 0,1 | ||
| JO2 | кг.м2 | 0,01 | 0,02 | 0,01 | 0,02 | 0,02 | 0,01 |
Додаток 2

СПИСОК РЕКОМЕНДОВАНОЇ ЛІТЕРАТУРИ
1. Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1988.
2. Кореняко А.С. Курсовое проектирование по теории механизмов и машин. - Киев: Вища шк., 1970.
3. Попов С.А. Курсовое проектирование по теории механизмов и машин. – М.: Высш. шк., 1986.
4. Девойно Г.Н. Курсовое проектирование по теории механизмов и машин. - Минск: Вышэйш. шк., 1986.
5. Методичні вказівки до розрахунково-графічної роботи №1 "Кінематичне дослідження плоских важільних механізмів 2-го класу" з дисципліни "Теорія механізмів і машин" Л. П.Вичисенко; ХДАТОХ. -Харків, 1999.
Навчальне видання
Укладач Лебединець Ігор Володимирович