|
|
Передача команд согласования скоростей.
Команды согласования скоростей должны обладать практически такой же помехозащищенностью, как и цикловые синхросигналы. Это объясняется тем, что ошибка при опознавании КСС равносильна изменению на один такт длительности цикла передачи (в ту или иную сторону в зависимости от вида ошибки) и вызовет сбой цикловой синхронизации в соответствующем объединяемом потоке. Последнее, в свою очередь, может вызвать сбой цикловой синхронизации во всех системах более низкого порядка этого цифрового потока. Однако между синхросигналами и КСС есть существенная разница, которая заключается в том, что первые обладают периодичностью, так как передаются в каждом цикле передачи, тогда как вторые несут информацию об однократных изменениях этого состояния. Поэтому помехозащищенность синхросигнала достигается методом накопления, и ошибка в одном или даже нескольких синхросигналах не вызывает сбоя цикловой синхронизации, а помехозащищенность КСС обеспечивается кодами, исправляющими ошибки.
В системах с односторонним согласованием скоростей необходимо передавать информацию о двух состояниях передающего устройства: отсутствии или наличии КСС. Для передачи этой информации достаточно одного двоичного разряда. Тогда для защиты от искажений одного символа КСС достаточно использовать трехразрядную кодовую группу, для защиты двух символов - пятиразрядную кодовую группу и т. д. Обычно в системах с односторонним согласованием скоростей для передачи соответствующих команд используются кодовые группы вида 00...0 - для передачи информации об отсутствии согласования скоростей и 11...1 для передачи информации о наличии согласования скоростей. Число символов в кодовой группе выбирают нечетным. При этом правильное опознавание КСС осуществляется, если число искаженных символов не превышает половины общего числа символов в команде.
В системах с двусторонним согласованием скоростей необходимо передавать информацию о двух состояниях передающего устройства: отсутствии согласования скоростей, положительном согласовании скоростей и отрицательном согласовании скоростей. Для передачи этой информации необходимо уже два двоичных разряда. Тогда для защиты от искажений одного символа КСС необходимо использовать пятиразрядную кодовую комбинацию, для защиты от искажения двух символов - семиразрядную кодовую комбинацию и т. д. Увеличение числа КСС и числа разрядов в кодовой комбинации приводит к возрастанию объема передаваемой информации.
Таким образом, по объему передаваемой информации системы с двусторонним согласованием скоростей и передачей трех команд менее экономичны, чем системы с односторонним согласованием скоростей, так как требуют большего объема передаваемой информации.
— Стремление реализовать достоинства систем с двусторонним согласованием скоростей и вместе с тем обеспечить такую же помехозащищенность, как в системе с односторонним согласованием скоростей при одинаковом числе разрядов кодовых групп команд, привело к созданию системы с двусторонним согласованием скоростей с исключением передачи команды об отсутствии согласования. Такие системы называются системами с двусторонним согласованием скоростей и двухкомандным управлением. По числу передаваемых команд подобные системы идентичны системам с односторонним согласованием скоростей. Структура двухкомандного сигнала показана на рисунке 1.62,а. При отсутствии согласования скоростей с передающей станции будет поступать чередование положительных и отрицательных команд согласования скоростей. Если временной интервал ∆Т между моментами записи и считывания достигнет значения Тсч, то необходимо произвести согласование скоростей. В этом случае передаются подряд две команды положительного или отрицательного согласования скоростей (рисунок 1.62, а). Такая структура передачи КСС позволяет выявить одиночные ошибки в передаваемых командах. Для рассмотрения возможности определения ошибок интервал времени передачи чередующихся команд назовем пассивным, а интервал времени передачи команд положительного или отрицательного согласования скоростей (две одинаковые команды подряд) активным.
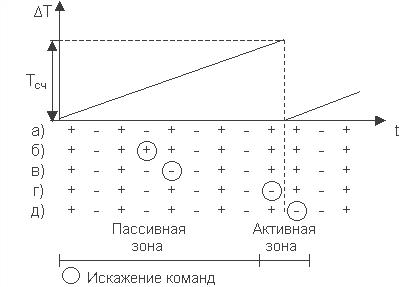 |
На рисунке 1.62, б, в показаны ошибки в пассивном интервале передачи команд. Эти ошибки легко обнаружить, так как подряд следуют три одинаковые команды, что при нормальной работе невозможно. Сложнее выявить ошибки в активном интервале (рисунок 1.62, г, д), поскольку в данном случае положительная команда трансформируется в отрицательную и наоборот. С учетом возможности коррекции ошибок в пассивном интервале или в обоих случаях и строятся приемники команд согласования скоростей.
Рисунок 1.62 Структура двухкомандного сигнала при двустороннем согласовании скоростей.
Приемник КСС с коррекцией ошибки в пассивном интервале показан на рисунке 1.63. Он содержит три узла: опознаватель, анализирующее устройство, корректор ошибок. Опознаватель определяет знак согласования скоростей. Анализатор выявляет положительную или отрицательную КСС. Он содержит триггер Тг, на один вход которого подаются импульсы команд положительного согласования скоростей, а на другой - отрицательные, и две схемы И.

При появлении подряд двух импульсов одинаковых команд второй импульс пройдет через свою схему И. Корректор ошибок служит для выявления ошибки в пассивном интервале времени. Он содержит два счетчика команд: положительных и отрицательных.

Рисунок 1.63 Приемник команд согласования скоростей с коррекцией ошибок на пассивном интервале передачи КСС.
Емкость счетчиков - три единицы. Счетчики подключены к опознавателю знака так, что появление команды определенного знака записывается в свой счетчик, а для другого счетчика он является сигналом сброса.
Если в счетчик подряд поступило три команды, необходимо осуществить коррекцию. При коррекции производится вставка или изъятие из цифрового потока одного из временного интервала в зависимости от прошедшей команды согласования скоростей. Такая коррекция не позволяет восстановить передаваемую кодовую комбинацию потока, но дает возможность сохранить длительность его цикла, что не повлечет за собой срыва цикловой синхронизации в этом потоке.
Для коррекции ошибок в активном интервале передачи команд с передающей станции поступает знак промежуточного значения изменения временного интервала между сигналами записи и считывания. Необходимо учесть, что команды согласования скоростей будут передаваться довольно редко. Это определяется стабильностью частоты задающего генератора, используемого при формировании низовых потоков и в оборудовании временного группообразования. Рассмотрим это на примере системы передачи ИКМ-120. Как будет показано далее, расхождение частот может достигать 120 Гц, т. е. за 1 с максимальное число КСС равно 120, а число циклов за 1 с - 8000, т. е. в 67 раз больше. В каждом цикле имеются временные позиции для передачи информационных символов при отрицательном согласовании скоростей. При отсутствии команд согласования скоростей эти временные позиции можно использовать для передачи знака промежуточного значения изменения временного интервала между сигналами записи и считывания. Из этого видно, что информация о знаке промежуточного значения изменения временного интервала будет передаваться значительно чаще, чем сами КСС.
При использовании такого способа коррекции каждая сдвоенная команда несет в себе информацию только о наличии согласования скоростей, в то время как решение о знаке этого согласования принимается на основе многократно передаваемой информации о знаке изменения временного интервала между сигналами записи и считывания. Как показано на рисунке 1.62, г, д при одиночном искажении сдвоенных команд последовательности (++) преобразуются в последовательности (- -), а последовательности (- -) (на рисунке не показаны) - в последовательности (++); при этом момент передачи сдвоенных команд сдвигается на один временной интервал передачи КСС. Это и используется в приемнике согласования скоростей для коррекции ошибок.
В схему приемника команд согласования скоростей добавляются узлы определения знака промежуточного состояния скоростей и устройство сравнения, определяющее несоответствие информации о знаке согласования скоростей виду сдвоенной команды.