|
|
Настройка фоновой стимуляции
Электростимулятор фоновый представляет собой упрощенный вариант электростимуляции, так как он не содержит элементов для привязки значений параметров стимуляции ко входам образа. Диалоговое окно Электростимулятор фоновый содержит только элементы для задания непосредственно амплитуды, длительности и периода стимуляции, на нем нет опций выбора типа привязки параметра: Пропорциональный и Пороговый. Кнопка Проба аналогично запускает режим тестовой стимуляции с текущими параметрами стимуляции.
Задающий генератор
Задающий генератор (ЗГ) позволяет генерировать периодический процесс на базе одного из двух примитивов – синусоиды или трапеции, все параметры которых могут изменяться (модулироваться) по произвольно заданному закону. Задающий процесс представляет собой квазипериодическое колебание, но в частном случае это может быть короткий фрагмент на временном интервале, определенном законом модуляции амплитуды в виде прямоугольного импульса, расположенного в требуемом месте временной оси. В общем случае каждый из формируемых процессов определяется для текущего управляемого или задающего этапа.
С точки зрения отображения задающего процесса (ЗП) в одной из модальностей (аудио, видео, электро) он эквивалентен контролируемому параметру, т.е. может быть подключен к любому доступному входу любого образа. При этом соответствующее имя задающего процесса попадает в список контролируемых параметров для привязки к параметрам отображения. Например, подключив ЗП на вход образа график, можно показать пациенту желаемый (навязываемый) характер периодического изменения тонуса контролируемой мышцы или дыхания, что невозможно сделать заданием обычных постоянных порогов.
При выборе задающего процесса, вместо полей для задания верхней и нижней границ, появляются поля с наименованиями: глубина модуляции (ГМ) и базовый уровень (БУ), в которых задаются соответствующие значения в процентах от максимума амплитуды генерируемого процесса. Глубина модуляции определяет тот поддиапазон возможного диапазона изменения значений генерируемого процесса, в котором оно будет изменяться по заданному закону. Базовый уровень определяет то значение свойства, относительно которого будет происходить его изменение. Базовый уровень свойства соответствует относительному значению результирующего процесса 50%. Этот подход можно рассматривать, как принятый способ задания порогов в виде верхнего и нижнего значения, считая, что базовый уровень является их средним значением, а глубина модуляции определяется их разностью, и в таком случае ГМ и БУ соответствуют коэффициенту масштабирования и смещения результирующего процесса на входе образа относительно исходящего от Задающего генератора процесса.
Например, предположим, что значения процесса генерируются в диапазоне от 0 до 1, тогда:
ГМ=100% и БУ=50% означает, что свойство будет изменяться от мин до макс относительно среднего значения, значение будет меняться от 0 до 1 относительно центра 0,5.
ГМ= 25%, а БУ= 70% – свойство изменяется в диапазоне от 57,5% до 82,5 % возможного относительно уровня 70%, значение будет меняться от 0,575 до 0,825 с центром в 0,7.
ГМ=50% и БУ=50% (Рис. 6.40) – свойство будет изменяться от 25% от максимума до 75% от максимума относительно 50%, значение будет меняться от 0,25 до 0,75 относительно центра 0,5.

Рис. 6.40. Формирование графика Задающего Генератора.
Рисунок иллюстрирует принцип перерасчета значений на входе образа при изменении значений ГМ и БУ, если к этому входу в качестве источника данных подключен Задающий Генератор.
Форма периода колебаний – синус или трапеция – для задающего процесса выбирается в поле Тип примитивадиалогового окна образа.
На основе трапеции путем изменения временных параметров ее элементов, можно получить различные варианты: пила прямая и обратная, треугольник, прямоугольник, меандр, а при помощи функции сглаживания в точках излома – колокол. Временными параметрами синусоиды является ее период, а трапеции – длительность переднего фронта, вершины, заднего фронта и основания. Временные параметры примитива могут быть постоянными или меняться по заданному закону на всей длительности реализации генерируемого процесса независимо друг от друга.
Для каждого из временных параметров и амплитуды возможно задание произвольной модулирующей функции. Задание значений параметров примитива может быть выполнено одним из двух способов: в абсолютном или относительном виде.
В абсолютном виде задаются значения всех временных параметров фаз трапеции или периода синусоиды в единицах времени (миллисекундах) вводом с клавиатуры или непосредственно на графике закона модуляции, если параметр переменный.
В относительном виде осуществляется непосредственная привязка начального значения временного параметра к выбранному статистическому показателю любого используемого в сценарии КП, например, RR-интервал или длительность ДЦ. Результирующее начальное значение параметра вычисляется из значения статистического показателя привязанного КП на момент начала работы этапа. В процессе управляемого этапа, текущее значение этого параметра может меняться по заданному закону.
Внимание! Независимо от единиц измерения используемого для привязки КП, цифровые значения его статистических параметров ЗГ воспринимает в размерности «миллисекунды». Например, среднее значение длительности дыхательного цикла 10 с при расчете длительности выбранного временного параметра примитива будет интерпретировано как 10 мс, что в большинстве случаев не отвечает вашей задаче. Для получения корректного результата в данном случае следует к среднему значению добавить множитель 1000, переводящий значение секунд в миллисекунды.
Переименование образа Задающий генератор
В состав управляемого или задающего этапа образ Задающий генератор включается с именем Синус (по форме задающего процесса). Можно переименовать образ применительно к используемой методике проведения БОС процедуры. Для этого на вкладке Образ нажмите кнопку Переименовать и введите нужное наименование образ, например ДДЦ (длительность дыхательного цикла).
Настройка Задающего генератора
Активизируйте вкладку Настройка окна БОС процедур и выберите переименованный Вами образ задающего генератора. В правой части окна появитсядиалоговое окно, которое будет иметь название установленного задающего закона (например, Синус, Трапеция, Для Дц1 и т.п.). Здесь используются понятия:
Задающий закон – характер изменений амплитудно-временных характеристик параметра задающего генератора сформированный произвольно в диалоговом окне или установленный по умолчанию;
Примитив –один период колебаниязадающего закона, сформированный произвольно в диалоговом окне или установленный по умолчанию. Параметры примитива могут сохраняться на протяжении всего этапа или изменяться.

Рис. 6.41. Диалоговое окно задающего генератора для примитива Трапеция.
a. Названия задающего закона.
b. Выбор типа примитива для задающего закона.
c. Загрузка настроек ЗГ из папки Generator.
d. Сохранение заданных настроек ЗГ в папке Generator.
e. Применение изменений параметров выбранного закона непосредственно во время работы.
f. Вызов диалогового окна Просмотр закона для предварительного просмотра формы задающего процесса.
g. Вызов диалогового окна Привязка к этапудля определения типа связи генерируемого процесса с изменившейся длительностью этапа.
h. Вызов диалогового окна Настройки параметров кривой для настройки параметров сглаживания сигнала.
i. Таблица для установления параметров примитива и привязки их к контролируемым параметрам.
j. Предварительный просмотр примитива.
В полеНазвание закона(Рис. 6.41 a) введите любое название для формируемого вами задающего закона в произвольном виде. ВыберитеТип примитива(Рис. 6.41 b)для задающего закона из двух вариантов, предложенных в списке: синус или трапеция.Смена типа примитива сбрасывает все настройки параметров примитива на параметры по умолчанию. Кнопки Выбрать (Рис. 6.41 c) и Сохранить(Рис. 6.41 d) открывают путь к папке Generator, в которой хранятся варианты ранее созданных задающих законов. Данные сохраняются в файле под именем, выставленном в поле Название закона.Кнопка Применить(Рис. 6.41 e) запускает выбранные условия генерации непосредственно во время работы. Кнопка Просмотреть(Рис. 6.41 f) вызывает диалоговое окноПросмотр закона (Рис. 6.42) для предварительного просмотра формы задающего закона. Всплывающая подсказка при установке курсора на графике показывает координаты соответствующей точки по амплитуде и времени.

| Рис. 6.42. Просмотр закона a. Поле демонстрации графика. b. Шкала масштаба по времени. c. Список, в котором можно выбрать масштаб по времени от 1 с до 30 мин. d. Полоса прокрутки. |
 Рис. 6.43. Диалоговое окно Привязка к этапу.
Рис. 6.43. Диалоговое окно Привязка к этапу.
| Привязка к этапу (см Рис. 6.41 g) определяет, каким образом будет изменяться задающий закон в связи с изменениями длительности этапа. Поле со списком При изменении длительности этапа закон открывает варианты: Масштабировать –при этом он будет изменяться пропорционально с изменением проигрывания этапа; Повторить– закон будет зациклен; Фиксировать –значения параметра останутся неизменными с того момента, когда истечет время первоначальной длительности этапа. |
Положение бегунка регулятора (Рис. 6.43) определяет, на протяжении какого времени будет реализовываться задающий закон. Это время указывается в поле Длительность реализации закона,здесь жемогут быть введены соответствующие изменения. Диапазон регулятора – первоначальная длительность всего этапа, на котором создавался закон.
Кнопка Сглаживание (Рис. 6.41 h) вызывает диалоговое окно Настройки параметров кривой (Рис. 6.44) для задания характера изменения примитива трапеция в точках излома. Пример сглаживания примитива трапеция приведен на рисунке 6.45.
Рис. 6.44. Диалоговое окно Настройка параметров кривой.

Рис. 6.45. Вид сглаженного примитива трапеция.
Параметры примитива(Рис. 6.41 i). Каждый тип примитива имеет определенные параметры. Так, синусописывается значениями амплитуды и периода, трапеция – амплитудой, передним и задним фронтами (участки нарастания и снижения), вершиной и основанием. В поле Параметры примитива в первом столбце приводится соответствующий список параметров и указывается тип их изменения (значки  – модуляции нет и
– модуляции нет и  – модуляция есть). Столбец Привязатьпозволяет выбрать в вызываемом списке необходимый контролируемый параметр. Столбцы НЗи КЗзадают соответственно начальные и конечные значения параметра, а столбцы Мах и Мin – максимальное и минимальное значения параметров на этапе, зависящих от вида модуляции. Тип параметра примитива обозначен в таблице значками (постоянное значение на всей длительности этапа) или (переменное значение). Тип меняется одним нажатием левой кнопки мыши на индикаторе. Значок ! означает, что значения параметра не определены, поскольку заданы в относительной форме и получат количественное значение после расчета статистики на предшествующем фоновом этапе.
– модуляция есть). Столбец Привязатьпозволяет выбрать в вызываемом списке необходимый контролируемый параметр. Столбцы НЗи КЗзадают соответственно начальные и конечные значения параметра, а столбцы Мах и Мin – максимальное и минимальное значения параметров на этапе, зависящих от вида модуляции. Тип параметра примитива обозначен в таблице значками (постоянное значение на всей длительности этапа) или (переменное значение). Тип меняется одним нажатием левой кнопки мыши на индикаторе. Значок ! означает, что значения параметра не определены, поскольку заданы в относительной форме и получат количественное значение после расчета статистики на предшествующем фоновом этапе.
 Рис. 6.46. Диалоговое окно Редактор закона.
Рис. 6.46. Диалоговое окно Редактор закона.
|  Рис. 6.47. Редактор закона.Ступенчатое изменение амплитуды трапеции со слабым сглаживанием.
Рис. 6.47. Редактор закона.Ступенчатое изменение амплитуды трапеции со слабым сглаживанием.
|
В случае если выбран переменный тип примитива, то двойное нажатие левой кнопки мыши вызывает диалоговое окно Редактор закона для задания закона модуляции выбранного параметра. Отсутствие модуляции параметра характеризуется горизонтальной линией на графике (Рис. 6.46). Линейное изменение выбранного параметра примитива производится перетаскиванием с помощью курсора начальной или конечной точки линии графика вверх или вниз. Вводя на графике дополнительные точки, можно формировать нелинейный закон модуляции параметра произвольной формы (Рис 6.47). Точки излома перемещаются курсором, их координаты сообщаются во всплывающей подсказке. Создать новую точку излома можно, установив в выбранном участке отрезка курсор и вызвав правой кнопкой мыши меню Добавить точку/Удалить точку.Сглаживание кривойпроисходит с помощью регуляторов при подключении флагаВключить сглаживание (см. рис. 6.44). По умолчаниюуровень сглаживания выставляется автоматически. Внесенные изменения отражаются в поле Форма примитива.
Контекстное меню, которое вызывается ПКМ в любом месте окна Редактор закона, позволяет подключать регулятор масштаба – Показывать слайдер, сетку – Использовать сетку, устанавливать максимальную границу диапазона – строка Максимальная границавызывает окно Настройка диапазона,в котором устанавливается выбранное значение, изменять размерность шкал Х и Y в трех вариантах: Минуты; секунды; не установлено.
По умолчанию временные параметры примитива заданы в абсолютном значении времени, выраженном в миллисекундах. Однако любой временной параметр примитива можно связать с контролируемым параметром, что позволяет автоматически адаптировать параметры задающего закона под каждого конкретного пациента. Для этого в столбце Привязкаполя Параметры примитива левой кнопкой мыши вызывается список контролируемых параметров (Рис. 6.49).

| Рис. 6.48. Результат использования модуляции амплитуды трапеции. |

| Рис 6.49. Привязка начального значения длительности переднего фронта трапеции к длительности фазы вдоха. |
Если выбрана привязка к контролируемому параметру, то в столбцах НЗ (начальное значение) и КЗ(конечное значение) можно использовать статистические показатели выбранного контролируемого параметра как часть формулы для расчета НЗ и КЗ. Например, если была осуществлена привязка длительности переднего фронта к КП «Твд», то в поле НЗ для него можно ввести «Среднее*1000». Тогда начальное значение примитива будет рассчитываться по формуле:
НЗ = Среднее * 1000,
где «Среднее» – это среднее значение контролируемого параметра «Твд», рассчитанное на предыдущем фоновом этапе, а 1000 - коэффициент пересчета секунд, в которых рассчитывается статистика КП, в миллисекунды, которыми оперирует образ ЗГ. В столбцах Мах, Minсодержатся соответственно максимальное и минимальное значения параметра примитива на временном интервале реализации закона, заданные в относительном виде.
Предварительный просмотр кривой,построенной при внесении изменений возможен в поле Форма примитива(Рис. 6.41 j; Рис. 6.49). Кривая, которую можно видеть в этом поле, является формой примитива, построенной по установленным параметрам. В случае, если используется модуляция хотя бы одного параметра примитива, поле содержит две кривые, причем кривая синего цвета описывает форму примитива в начале этапа, а красного цвета – в конце. Всплывающая подсказка, которая появляется при подведении курсора к любой точке кривой, описывает ее координаты. Регулятор в левой части поля также позволяет изменять масштаб кривой, однако эти изменения не будут сохраняться. Курсор, подведенный к бегункам регулятора, вызывает всплывающую подсказку с относительным значением масштаба (в процентах). Щелчок правой кнопкой мыши на любом участке поля вызывает контекстное меню, которое дает возможность вызывать/удалять регулятор и менять размерность шкалы Х (длительность примитива).
Игры
Игровой образ 2D
Игровой образ 2D предназначен для проведения БОС-тренинга в игровой форме, и может использоваться только на управляемом этапе. Данный образ подходит для этапов БОС-тренинга, целью которых является смещение и удержание контролируемого параметра (КП) в определённом коридоре. Целью игры, представленной данным игровым образом, является путешествие на каком-либо объекте, управляемом пациентом (в приведенном примере – на воздушном шаре), и преодоление им заданного пути. По аналогии с компьютерными играми, образ использует идеологию игровых уровней и предоставляет возможность полного изменения внешнего вида игры при прохождении определённого участка пути (уровня). Каждый игровой 2D образ представлен так называемым скин-файлом, полностью описывающим сценарий игрового процесса и внешний вид образа. Библиотека ресурсов включает в себя несколько скин-файлов, которые можно использовать при редактировании сценария. Более того, формат скин-файлов открыт и описан в приложении, поэтому можно расширить набор скин-файлов, создав свои собственные игровые уровни. Окно игрового 2D образа (Рис. 6.50) представляет собой панораму, по которому перемещается управляемый пациентом объект [3].

Рис. 6.50. Окно игрового образа 2D.
a. Управляемый объект (далее – Объект).
b. Индикатор карты местности.
c. Маркер текущего положения Объекта на карте местности.
d. Маркеры пройденного и оставшегося пути на индикаторе карты местности.
Траектория пути, внешний вид и размеры маркеров определяются скин-файлом. Маркеры пройденного пути позволяют оценить по карте максимальный процент пройденного пути в случае наличия в игровом поле штрафных зон (см. далее) и обратного перемещения Объекта.
Управление объектом (в данном примере – воздушным шаром) осуществляется по следующему принципу: всему диапазону высот игрового поля ставится в соответствие пропорциональный вход Высота объекта[4]. Таким образом, значению контролируемого параметра, связанного с данным входом, однозначно ставится в соответствие Y-координата управляемого объекта, то есть при изменении КП Объект перемещается в вертикальной плоскости. Поскольку игровой 2D образ предназначен для сеансов БОС тренинга, целью которых является удержание КП в определённом коридоре, помимо изменения вертикальных координат Объект с помощью КП необходимо каким-либо образом стимулировать удержание пациентом определённого значения КП (т.е. удержание определённой высоты управляемого объекта). Для этой цели вводятся понятия зон управления и штрафных зон.
Зоны управления и штрафные зоны являются поддиапазонами всего диапазона высот управляемого объекта. При попадании в зону управления объект начинает двигаться вперёд (в примере, рассмотренном выше, управляемые зоны соответствуют попутному ветру, способствующему движению воздушного шара в нужном направлении). Скорость движения зависит от близости управляемого объекта к верхней границе управляемой зоны[5]. В области верхней границы зоны скорость Объекта максимальна, в области нижней границы – равна нулю. Внутри управляемой зоны скорость объекта линейно интерполируется от нуля до максимума. Попадание объекта в штрафную зону также приводят к его перемещению, но уже в противоположном направлении (скорость определяется по аналогичному управляемой зоне закону). В рассматриваемом выше примере с путешествием на воздушном шаре штрафные зоны соответствуют встречному ветру, способствующему движению воздушного шара в противоположном направлении (возвращение к месту старта). При необходимости может быть задано до трех зон управления (попутного ветра) и столько же штрафных зон (встречного ветра).
Выбор файла со сценарием игрового образа
В окне проигрывания БОС процедур выберите управляемый этап (Игра), содержащий 2D образ, активизируйте вкладку Настройкаи войдите в настройки образа Игровой 2D образ.

|
Рис. 6.51. Настройка Игрового 2D образ.
|
Заданная последовательность сценариев (скин-файлов с расширением *.2ds) определяет игровой процесс на этапе сценария процедуры БОС тренинга. Каждый последующий сценарий игрового образа будет автоматически вызываться после прохождения маршрута, заданного в предыдущем сценарии. Чем выше скорость игрового объекта (чем лучше пациент будет управлять КП), тем больше сценариев игрового образа будет использовано на этапе. Для просмотра выделенного игрового сценария нажмите кнопку Просмотр. С помощью регулятора Скорость изменения координаты (Рис. 6.51 d)устанавливается скорость изменения вертикальной координаты Объекта: для быстрых процессов (прыжков) следует установить регулятор в положение Макс.
Вкладка Дисплей аналогична одноименным вкладкам видеообразов (Рис. 6.13).
Настройка входов игрового 2D-образа
В окне проигрывания БОС процедур выберите управляемый этап, содержащий 2D образ и активизируйте вкладку Настройка, позволяющую привязать вход Высота объекта к значениям КП, задать от одной до трёх независимых зон управления (Зона управления 1 … Зона управления 3) и до трёх независимых штрафных зон (Штрафная зона 1 … Штрафная зона 3). Исходя из определения управляемых и штрафных зон, все входы, используемые для их задания, должны быть связаны с тем же контролируемым параметром, что и вход Высота объекта. Кроме этого, границы входов, задающих зоны, не должны выходить за границы входа Высота объекта (см. раздел 6.1.2 «Настройка пропорциональных входов образов»).

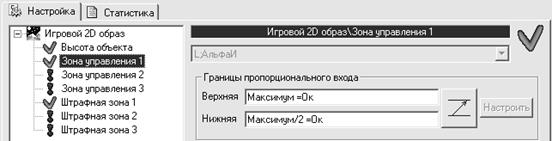

Рис. 6.52. Пример настройки входов Игрового 2D образа, обеспечивающих следующий закон управления объектом: максимальная скорость в противоположном направлении для минимального значения КП, максимальная скорость в нужном направлении для максимального значения КП, и линейная интерполяция скорости Объекта между ними.
Игровой образ 3D
Игровой образ 3D может использоваться для сеансов БОС тренинга, целью которых является периодическое кратковременное изменение (повышение или понижение) КП в заданные моменты времени. Задачей трёхмерной игры является путешествие объекта (например – Колобка), управляемого пациентом, и сбор встречающихся по пути призов. Описание внешнего вида 3D образа и его сценарий представлены в скин-файле (расширение *.3ds). Библиотека ресурсов (папка GameModus3D) включает в себя несколько сценариев 3D образов, которые можно использовать при создании и редактировании процедур. Более того, формат скин-файлов открыт, поэтому Вы можете расширить их набор, создав свои собственные скин-файлы.
Окно игрового 3D образа представляет собой трёхмерное игровое поле, по которому перемещается управляемый пациентом объект (далее – Объект).

Рис. 6.53. Пример игрового 3D образа.
a. Управляемый Объект, внешний вид и размеры которого определяются скин-файлом. Координаты Объекта управляются и контролируются с помощью КП.
b. Зона захвата Объекта представляет собой полупрозрачную сферу, в которую вписан Объект. Уровень прозрачности сферы регулируется.
c. Приз. Внешний вид и размеры приза определяются скин-файлом.
d. Зона захвата приза. Уровень прозрачности описывающей сферы регулируется во вкладке Призы (рис. 6.55). Приз считается захваченным, если любая из точек зоны захвата Объекта соприкасается с любой из точек зоны захвата приза.
e. Счётчик собранных призов.[6]
f. Счётчик пропущенных призов.
g. Индикатор общего количества призов.
Управление Объектом осуществляется по следующему принципу. Объект автоматически перемещается в горизонтальной плоскости с постоянной скоростью, а перемещение в вертикальной плоскости осуществляется с помощью контролируемого параметра. Весь диапазон высот игрового поля привязан к пропорциональному входу Высота объекта. Таким образом, значению контролируемого параметра, связанного с данным входом, однозначно ставится в соответствие Y-координата управляемого объекта. При этом возможны два варианта перемещения Объекта на заданную высоту: режим полёта и режим прыжка. В первом случае, при изменении значения КП, вертикальная координата объекта плавно изменяется с текущего значения до значения, соответствующего значению КП. Во втором случае при ненулевом значении КП Объект перемещается с нулевой высоты на высоту, определяемую текущим значением КП, затем возвращается обратно. Данный режим может использоваться для БОС тренинга с использованием в качестве КП электромиограммы (ЭМГ). Режим управления высотой объекта задаётся на уровне скин-файла. Закон распределения призов определяется пропорциональным входом Высота приза и настройками вкладки Призы. Вход Высота приза предназначен для подключения к задающему генератору и позволяет расположить призы на траектории, заданной с помощью генератора. Кроме этого, призы могут генерироваться на случайной высоте с помощью флага Случайная высота генерации призов во вкладке Призы. При этом настройки входа Высота приза игнорируются.
Частота генерации призов определяется флагами Интервал генерации призов и Интервал разброса при генерации призов.
Выбор файла со сценарием игрового образа
В окне проигрывания БОС процедур выберите управляемый этап Игра, содержащий 3D образ, активизируйте вкладку Настройка, установите маркер на Игровой 3D образ и войдите в его настройки. Для выбора нового сценария 3D-образа нажмите кнопку Обзори в ресурсах в папке GameModus 3D выберите нужный файл. Кнопка Просмотрпозволит просмотреть образ. С помощью регулятора можно установить максимальную скорость изменения вертикальной координаты Объекта (регулятор в положении Макс) в том случае, если в процессе тренинга значения КП должны изменяться быстро (например, резкое напряжение мышцы).
Настройка входов игрового 3D-образа
В окне редактирования этапа на вкладке Настройка выберите входы Высота прыжкаиВысота размещения приза.


Рис. 6.54. Пример настройки входов игрового 3D образа с использованием задающего генератора для задания.
Настройка закона генерации призов
В окне Игровой 3D образ активизируйте вкладку Призы для настройки закона генерации призов, который определяется пропорциональным входом Высота призаи настройками вкладки Призы. Вход Высота приза предназначен для подключения к задающему генератору (см. раздел 6.5 «Задающий генератор») и позволяет расположить призы на заданной с помощью генератора траектории. Кроме этого, призы могут генерироваться на случайной высоте, если включена опция Случайная высота генерации призов. При этом настройки входа Высота приза игнорируются.
Частота генерации призов определяется параметрами Интервал генерации призовиИнтервал разброса при генерации призов (в милисекундах), которые подбираются исходя из требуемого темпа управления КП.
Задержка Длительность удержания приза позволяет усложнить процесс сбора призов путём введения так называемого времени удержания приза (в милисекундах). Если в данном поле введено отличное от нуля значение, то приз считается собраным только после того, как зона захвата Объекта непрерывно соприкасается с зоной захвата приза в течение заданного промежутка времени. При задании ненулевого времени удержания приза, перемещение Объекта в горизонтальной плоскости прекращается в момент захвата приза и возобновляется либо после сбора приза, либо после его потери. Захват сопровождается миганием приза.

Рис. 6.55. Настройка закона генерации призов для игрового 3D образа.
Параметр Область захвата призапозволяет настроить сложность игры, изменив зону захвата призов. Зона захвата представляет собой сферу, в которую вписан приз, соприкосновение с любой из точек сферы приводит к сбору приза.
Регулятор Подсветка области захвата позволяет установить уровень прозрачности зоны захвата. Приз считается собранным, если любая из точек зоны захвата объекта соприкасается с любой из точек зоны захвата приза.
Внимание! Для сохранения изменения содержимого любого из расположенных в данной вкладке полей ввода требуется нажать на кнопку «Задать».