|
|
Особливості і класифікація
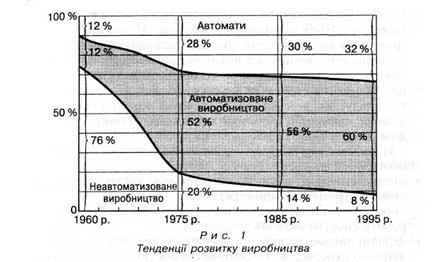
Тенденція розвитку автоматизованого та автоматичного виробництва свідчить, що від початку виникнення інженерної психології до сьогодення частка неавтоматизованого виробництва зменшилася з 76 % до 8 %, а автоматизованого і автоматичного — зросла відповідно з12%до60%із12% до 32 %. Це означає і дедалі більшу витребуваність операторської діяльності.
У загальній теорії систем (системології) систему розуміють як комплекс взаємопов'язаних та взаємодіючих між собою елементів, поєднаних спільною метою і спільною інформаційною мережею.
Інженерна психологія розглядає системи, в яких задіяні як людина, так і технічні пристрої. Все, що знаходиться в СЛМ між людиною і керованим об'єктом, умовно зветься машиною, тобто машина — знаряддя праці людини-опера-тора, а він сам — суб'єкт праці.
Залежно від сфери застосування, СЛМ мають відповідну структуру, визначаються ступенем участі й кількістю операторів. З цими ознаками пов'язані й функції оператора в СЛМ, що зумовлює необхідність класифікації діяльності оператора і самих систем «людина — машина». Основою такої класифікації можуть бути групи ознак:
- цільове призначення системи;
- характеристики людини або певної групи людей;
- тип і структура машини;
- тип взаємодії у самій системі.
За призначенням системи поділяються на такі класи:
- керуючі, основне завдання яких — керування машиною або комплексом;
- обслуговувальні, в котрих людина наглядає за діяльністю машини, проводячи її ремонт і налаштування тощо;
- навчальні, до яких належать технічні засоби навчання, тренажери, імітатори і т. ін.;
- інформаційні, що забезпечують пошук і накопичення не обхідної інформації (системи зв'язку, телевізійні, радіолокаційні, документальні системи тощо);
- дослідницькі, які використовуються у вивченні різних явищ, пошуку нової інформації та закономірностей (прилади та пристрої, макети і моделі самої системи).
За характером «людського компонента» СЛМ поділяються на:
- моносистеми: один оператор і один технічний пристрій;
- полісистеми, в котрих значна кількість людей взаємодіє з багатьма технічними пристроями; різновидом таких систем є соціотехнічні системи. Крім цього, полісистеми поділяються на паритетні та багаторівневі, ієрархічні. Вперших — паритетних — інформація подається і за формою, і за змістом однаково для всіх. Наприклад, табло групового використання або системи забезпечення життєдіяльності людини на човні чи космічному кораблі. У других — багаторівневих — на обмін інформацією впливає ієрархічна структура взаємодії людей з технікою. Для прикладу, це — система управління повітряним рухом літаків: найвищий рівень — диспетчер аеропорту, далі — командир літака, потім — члени екіпажу.
За типом і структурою машинного компонента СЛМ поділяються на:
- інструментальні, в яких оператор використовує найпростіші інструменти, прилади;
- прості автоматизовані, в котрих технічні засоби перетворюють енергію людини;
- складні автоматизовані, де функціонують різні за призначенням, складністю і підпорядкованістю технічні компоненти. Керування такими системами здійснюється не тільки за схемою «людина — машина», а й у ланцюгу «лю
дина — людина — машина».
За характером взаємодії СЛМ поділяються на три основні типи (за специфікою участі оператора у процесі керування).
У системах першого типу процес керування відбувається безперервно, оператор спостерігає за цими процесами і втручається тільки тоді, коли треба ліквідувати відхилення. Такі системи мають високий ступінь автоматизації виробничих процесів, тому їх застосовують у хімічній, металургійній промисловості тощо.
У системах другого типу процес керування також безперервний, але оператор періодично, дискретно сам вирішує низку певних завдань, між якими є так звана оперативна пауза. Це — системи автоматизованого зв'язку, радіолокаційні системи.
Для систем третього типу характерна чітка дискретність вирішення оператором певних завдань. Це — системи управління польотами, транспортні системи, системи з відстроченим зворотним зв'язком.
Окремо виділяють системи безперервної взаємодії, до яких належать системи типу «водій — автомобіль».
Наведена класифікація не є єдиною. Приклади інших підходів відображені у спеціальній літературі [33; 57; 60; 134; 142]. Оригінальним є підхід, запропонований А. О. Криловим [60], який виділяє такі типи СЛМ:
системи управління рухомими об'єктами;
системи управління енергетичними об'єктами;
системи управління технологічними процесами циклічного типу;
системи нагляду та виявлення об'єктів;
системи управління транспортними засобами, розподілу
енергії диспетчерського типу.
Автоматизовані системи управління рухомими об'єктами можуть бути двох основних видів:
- керуюча система з одним оператором, що розташована на самому об'єкті;
- керуюча система, розташована поза об'єктом; її завданням є забезпечення досягнення об'єктом певної мети за необхідний час. Меті підпорядковане вирішення оперативних завдань, серед яких головними вважаються: утримання необхідних параметрів руху об'єкта і гарантування безпеки його переміщення.
Робота операторів, що управляють рухами об'єктів, має характерні особливості, які зумовлені значною швидкістю пересування об'єктів, раптовим виникненням критичних ситуацій, значною ймовірністю зміни параметрів довколишнього середовища тощо. Для операторів, які знаходяться на самому об'єкті, важливе значення має стан емоційної напруженості під час їхньої діяльності. До того ж вони залежать від таких факторів, як прискорення, зміна тиску, температура, вібрація, коливання, шум тощо. Крім того, оператори в окремих випадках повинні працювати у спеціальному спорядженні і перебувати у малогабаритних приміщеннях.
Слід зауважити, що в самій діяльності оператора є не тільки високоактивні періоди, а й малоактивні, монотонні, які пов'язані з очікуванням необхідної інформації, або з використанням автоматів (автопілот, авторульовий), або з одноманітним довколишнім середовищем (автомобільні дороги, особливо в нічний час).
Цілком зрозуміло, що сама система висуває підвищені, жорсткі вимоги до стану здоров'я і фізичної підготовки операторів. Важливим є наявність у них таких психологічних рис, як рішучість, здатність швидко оцінювати інформацію і приймати рішення, емоційна стійкість, швидке переключення уваги, збереження готовності до дій за період монотонії (оперативна готовність), доведення до автоматизму відповідних рухових дій.
Автоматизовані системи управління енергетичними установками теж підрозділяються на:
- системи управління транспортними засобами;
- стаціонарні.
Цільове призначення цих систем полягає у забезпеченні роботи машин як джерела енергії у заданому режимі і протягом установленого часу. Оперативні завдання у системі підпорядковані контролю і регулюванню енергоресурсів, а також захистові енергетичної установки. Для досягнення цієї мети використовуються різні засоби відображення інформації, переважно мнемосхеми та цифрові й стрілкові контрольно-вимірювальні прилади, а також органи управління, переважно перемикачі та регулятори. Вони поєднані у спеціальні пости, які можуть бути розташовані недалеко від самих енергетичних установок. Оператори даних систем можуть відчувати на собі вплив таких факторів довколишнього середовища, як прискорення, коливання, зміна кліматичних і фізичних умов.
Головна проблема діяльності операторів таких систем — це збереження готовності до дії. У критичних ситуаціях оператор має швидко зорієнтуватись, поставити правильний технічний діагноз і прийняти ефективне рішення, а також вміти застосовувати ручне управління. Для цього він повинен володіти знаннями про будову системи, взаємодію її складових і утримувати в пам'яті значну кількість характеристик і параметрів її роботи.
Автоматизовані системи управління технологічними процесами циклічного типу широко використовують у промисловому виробництві масового випуску якого-небудь продукту. За певний цикл технологічного процесу початкова форма продукту може перейти у кінцеву або проміжну, придатну для подальшої обробки. Вирішення основних оперативних завдань пов'язане із забезпеченням необхідних параметрів технологічного процесу і контролем якості продукції. Умови роботи оператора характеризуються монотонністю, яка збільшується з ростом циклічності технологічного процесу. В системах значного рівня автоматизації монотонність стосується процесів контролю, а за незначного рівня автоматизації вона пов'язана з виконанням однотипних, повторних дій. При цьому монотонність може бути поєднана зі значним інформаційним навантаженням, що висуває певні вимоги до швидкості дій оператора, концентрації і переключення його уваги, прийняття рішень тощо.
Автоматизовані системи нагляду за ситуацією використовуються для отримання інформації про наявність об'єктів у визначених зонах повітряного і водного середовища. Головними оперативними завданнями є виявлення об'єктів, їх впізнання і нагляд за переміщенням їх у середовищі. При цьому в оператора немає ніякого зв'язку з об'єктом, і він не може впливати на його переміщення. Для вирішення основних завдань необхідні доволі «чутливі» системи і певний досвід самого оператора, який може забезпечити формування перцептивних еталонів різних об'єктів. Робота в таких системах потребує постійної уваги за екранами в умовах недостатнього освітлення у приміщеннях. Все це вимагає належної організації робочих місць, режимів роботи й умов реабілітації.
Автоматизовані системи управління диспетчерського типу використовуються при управлінні транспортними засобами, розподілі енергії тощо. Основне їх призначення полягає в обслуговуванні, і тому центральними оперативними завданнями є: приймання замовлень, встановлення черги, контроль завантаження і виконання команд. Оператор, отримуючи інформацію, повинен вирішити питання про значущість певного замовлення серед інших (наприклад, запит на аварійну посадку літака), визначити канал обслуговування, прийняти певне рішення і зреалізувати його. Робота опера-торів-диспетчерів дуже інтенсивна і неритмічна. Висока відповідальність за прийняття рішень значно напружує діяльність операторів, що вимагає від них високої емоційної стійкості. Крім того, висуваються високі вимоги щодо обсягу їхньої пам'яті, характеристик оперативного мислення, чіткості і виразності мовлення.
За всієї різноманітності СЛМ вони мають і певні загальні риси та особливості, до яких належать: динамічність, цілеспрямованість, адаптивність, само впорядкованість.
Динамічність СЛМ пов'язана з її структурою, яка визначається взаємодією елементів різної природи та змінами характеру взаємозв'язків. Це зумовлює такі її властивості:
- розгалуженість структури СЛМ або зв'язків між елементами цієї структури;
- різноманітність природи елементів СЛМ (людина, група чи групи людей, автомат, машина, комплекс);
- автономність елементів, яка полягає у їхній здатності незалежно від інших виконувати свої функції;
- гнучкість самої структури СЛМ, що забезпечує перехід і виконання різних функцій оператором.
Цілеспрямованість полягає в тому, що система сама може змінювати завдання та способи їх вирішення. Цілеспрямованість СЛМ забезпечує людина, котра ставить або формулює мету, створює програму її досягнення.
Адаптивність підтримує ефективність функціонування СЛМ на належному рівні, незалежно від змін обставин її роботи. Певний час ця властивість СЛМ реалізовувалася тільки завдяки пристосуванню людини до машини. Зараз розглядаються питання взаємної адаптації в системі шляхом пристосування технічних засобів або їхніх параметрів до конкретного психофізіологічного стану людини чи показників ефективності її діяльності.
Самовпорядкованість розглядається як властивість СЛМ зменшувати свою ентропію (невизначеність) після виведення її з нормального, стійкого функціонування. Реалізація цієї властивості можлива тільки за цілеспрямованої діяльності людини, здатності оператора планувати свої дії та реалізовувати їх різними способами.
Розглянуті риси СЛМ забезпечують її інтегрувальну властивість — живучість.