|
|
Фототріангуляція за відомих координат центрів проекцій
У практиці фототріангуляційних робіт є два випадки, коли координати центрів проекцій відомі.
Перший з них стосується фототеодолітного знімання, в якому центри фотографування відомі з геодезичних робіт. Здебільшого відомі координати фото станції, а координати центра проекції можуть бути визначені, якщо відомі
кутові елементи зовнішнього орієнтування та висота інструмента (рис. 3). Тут:
Qo - центр фото станції; С - центр обертання фототеодоліта; Q - перетин осі Ζ з головною оптичною віссю фотокамери, якщо ԝ=0;
ω - кут нахилу фотокамери,
r - стала фотокамера.
Якщо елементи зовнішнього орієнтування (кутові і лінійні) точно відомі, то геодезичні координати точки об'єкта обчислюють за формулами прямої фотограмметричної засічки:
 (1.16)
(1.16)
де Qл - ліва фото станція; л - індекс, що означає лівий знімок, a2,b2,c2- напрямні
косинуси; Bt - базис фотографування, приведений до горизонтального положення, xtл, ytл, pt - трансформовані координати і повздовжній паралакс виміряної точки.

Рис.3. Зміна координат центра проекції при нахилі фототеодоліта
Тут α - кут, утворений віссю Χr і проекцією головної оптичної осі фотокамери на горизонтальну площину:
α=Α+φ-90°, (1.17)
А - дирекційний кут базису фотографування;
φ-кут скосу;
ω - кут нахилу фотокамери, к-розворот знімка в своїй площині.
Під час побудови фототріангуляційної мережі способом в'язок для кожної виміряної точки складають два рівняння поправок:
 (1.18)
(1.18)
де αx,………fz - частинні похідні, отримані з диференціювання видозмінених рівнянь колінеарності.
Подальше застосування МНК та організація ітераційного процесу є аналогічними до способу в'язок для аерофотознімків.
`Другий випадок стосується аерофототріангуляції з використанням даних
глобальних позиційних систем (GPS).
Сучасні GPS дають змогу фіксувати місцезнаходження літака, морського
судна, автомобіля з дуже високою точністю - від кількох сантиметрів до десятка сантиметрів.
Опускаючи деякі деталі, формалізуємо задачу так: для кожного центра фотографування лінійні елементи зовнішнього орієнтування Xs, Ys, Zs відомі. Необхідно побудувати мережу блочної фототріангуляції.
У такому разі рівняння поправок набирають вигляду:
 (1.19)
(1.19)
Як відомо, для побудови фототріангуляції способом в'язок необхідно мати опорні точки, розташовані по периметру блока. Тоді для опорних точок у рівняннях (1.1) ΔX = δΥ = δΖ = 0 , тобто поправки для них не визначаються, а у разі застосування МНК задача з побудови мережі має розв'язок.
Якщо відомі лінійні елементи зовнішнього орієнтування всіх знімків, опорних точок взагалі не потрібно. Цей, на перший погляд парадоксальний, висновок отримав теоретичне та експериментальне підтвердження [5].
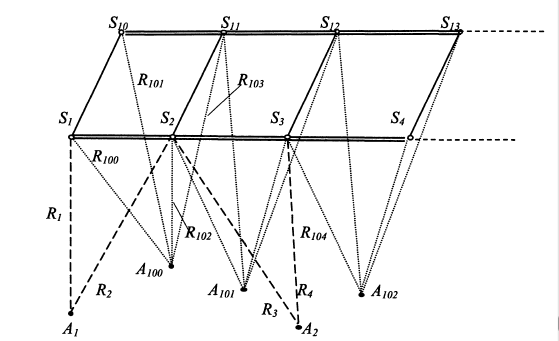
Рис.4. Блокова мережа з двох аерофотознімальних маршрутів зі зв'язковими точками для стереопар та маршрутів
Для повного розв'язання цієї задачі використовуються фотограмметричні зв'язки між знімками, що належать одному маршруту (передовсім зв'язкові точки) та між знімками сусідніх маршрутів (для точок, що лежать у міжмаршрутному перекритті). Геометрична суть задачі випливає з рис.4.
На рис.4: S1, S2, S3,... - центри фотографування i-го маршруту;
S10, S11, S12,... - центри фотографування i+l-гo маршруту;
Α1, А2,... - точки, що зобразились на і-му маршруті;
Am, Ат,... - точки, спільні для і та і +1-го маршруту.
Нахили знімків приводять до зміни векторів R1та R2, R100та R101. Це нагадує гойдалку: знімки з центрами S1та S10 нахиляються доти, доки вектори R1та R2не перетнуться в точці А1 Вищеописаний спосіб, що ґрунтується на рівняннях (1.19, апробований на макетних знімках (дослідження виконав І. Колб, Львівська політехніка). Доведена правильність ідеї та досліджена точність способу при різноманітних параметрах змодельованого аерофотознімання.
Запропонований спосіб дає змогу зробити такі істотні висновки, які раніше в літературі не зустрічались.
1. Оскільки цей спосіб реалізується в аналітичній фотограмметрії виключно за строгими формулами, які не накладають жодних обмежень на кути нахилу знімків, то немає потреби в гіростабілізувальних установках. Це здешевить аерофотоапаратуру.
2. Блочна мережа будується без жодної опорної точки. Це стає особливо
цінним при фотографуванні недоступних територій, на яких неможливо виконувати геодезичні роботи та визначити опорні точки.
Для високоточного фіксування координат центрів проекції доцільно використати диференційний режим роботи GPS, коли на літаку функціонує приймальна GPS-станція, а на місцевості в районі аерознімальних робіт встановлена базова GPS-станція. Така схема допомагає уникнути невизначеності GPS-визначень та підвищити точність фіксації просторових координат центрів проекцій, якщо віддаль від літака до базової станції не перевищує 50 км.