|
|
Системы предупреждения столкновений (СПС).
Безопасность вождения наземных транспортных средств при наличии препятствий на маршруте движения повышается при их оснащении системами противостолкновений. Все известные системы противостолкновений [ 8 ] построены по принципу: в процессе движения дистанция до препятствия S должна быть не менее дистанции безопасности Sб, необходимой до полной остановки движущегося с данной конкретной скоростью автомобиля с момента принятия водителем решения о торможении:
S ³ Sб, (2. 36).
Укрупненная блок схема системы противостолкновений приведена на рисунке 2.23.
Во время движения автомобиля датчик дистанции и датчик скорости вырабатывают сигналы о дистанции S до препятствия и о скорости автомобиля Va. Вычислитель дистанции безопасности по сигналам датчиков дистанции и скорости, а также по вводным с пульта управления дополнительным данным по соответствующим алгоритмам вычисляет дистанцию безопасности Sб. Сигналы S и Sб, сравниваются в блоке сравнения; при S £ Sб на выходе появляется сигнал, используемый либо для световой и звуковой сигнализации (пассивные системы), либо для автоматического регулирования скорости автомобиля и торможения (активные системы), обеспечивающих превышение дистанции до препятствия над дистанцией безопасности. При разработке алгоритмов вычисления дистанции безопасности целесообразно учитывать следующие соображения и возможные режимы движения препятствия и автомобиля.
Препятствие неподвижно. Признаком неподвижности препятствия является равенство отрезка пути DSа1, проходимого автомобилем за время D t, величине изменения расстояния DS1 между автомобилем и препятствием за тот же отрезок времени D t
DSа1=DS1.
Если торможение автомобиля начиналось при скорости Vа1 и происходило с ускорением аа1, то тормозной путь до полной остановки равен:

где tå - суммарное время реакции водителя и запаздывания срабатывания устройств тормозной системы.
Дистанция S1 до препятствия перед началом торможения должна превышать дистанцию безопасности, минимальная величина которой должна быть принята не менее тормозного пути SТ1:
 (2.37)
(2.37)
Препятствие движется в попутном автомобилю направлении. Особенность данного режима движения состоит в том, что дистанция безопасности, обеспечивающая исключение столкновения автомобиля с препятствием до полной его остановки, может быть уменьшена по сравнению с величиной тормозного пути автомобиля на величину отрезка пути, проходимого препятствием за общее время торможения tТ2:
Sб2 ³ SТ2 - VппtТ2 , (2.38)
где Vпп - скорость препятствия в попутном направлении.

Скорость Vпп можно определить как сумму скорости автомобиля и относительной скорости препятствия относительно автомобиля:
Vпп = Vа2 ± Vотн2 (2.39)
где "+" при DSа2< DS2
"-" при DSа2>DS2.
Если Vпп > Vа2, то расстояние S2 между автомобилем и препятствием в процессе их движения увеличивается и справедливо неравенство DSа2< DS2 , а в выражении (2.39) берется знак "+"; если Vпп < Vа2 , то расстояние S2 уменьшается DSа2>DS2 , а в выражении (2.39) берется знак "-". Учитывая, что время торможения есть сумма времени tå и времени торможения автомобиля до полной остановки:

выражение (2.33) примет вид
 (2.40)
(2.40)
где
 .
.
Препятствие движется навстречу автомобилю. Особенность данного режима движения состоит в том, что дистанция безопасности, обеспечивающая исключение столкновения с препятствием до полной его остановки, увеличивается по сравнению с длиной тормозного пути автомобиля на величину отрезка пути, проходимого препятствием навстречу автомобилю за общее время торможения tтз:
 (2.41)
(2.41)
где Vпв - скорость препятствия во встречном направлении.
Аналогично выражениям (2.40) и (2.41) запишем

 (2.42)
(2.42)
где
 .
.
Признаком встречного движения препятствия является сокращение в процессе движения расстояния S3 между автомобилем и препятствием при одновременном соблюдении неравенства DSа3 < DS3.
Заметим, что в данном режиме использование выражения (2.42) означает только то, что столкновение с препятствием исключается до момента полной остановки автомобиля.
В активных СПС, обеспечивающих автоматическое регулирование скорости ОН до величин, позволяющих поддерживать соблюдение неравенства (2.36), необходима информация об относительной скорости ОН и расстояния S до препятствия. На рис. 2.24 представлена схема, поясняющая устройства и принцип действия СПС на базе доплеровского измерителя, обеспечивающего одновременное измерение относительной скорости ОН и препятствия, а также расстояния до него.
В схеме устройства системы предупреждения столкновений (рис. 2.24) используется приемо-передающая параболическая антенна 1. Форма зеркала выбирается так, чтобы на вход приемника не поступали сигналы, отраженные от дороги. Формируемый клистроном передатчика 3 непрерывный СВЧ сигнал излучается антенной 1. Принимаемый этой же антенной отраженный от препятствия сигнал и часть излучаемого через волноводное устройство 2 поступает на детекторы 4 и 5, причем фаза опорного сигнала, поступающего на детектор 5 сдвинута относительно фазы опорного сигнала, поступающего на детектор 4 на минус p/2. Это обеспечивает разность фаз колебаний на выходах детекторов 4 и 5, равную минус p/2 в случае удаления ОН от препятствия, и плюс p/2 в случае их сближения. Информация об относительной скорости ОН и препятствия заложена в частоте колебаний на выходе этих детекторов, а о дальности до препятствия - в их амплитуде. Равные по амплитуде колебания с выходов детекторов 4 и 5 поступают на входы усилителей 6 и 7. Коэффициенты усиления регулируются устройством управления 13 в соответствии с частотой размыкания прерывателя 14 двигателя ОН, что обеспечивает учет абсолютной скорости ОН и эквивалентно относительному уменьшению расстояния от ОН до препятствия.
Дифференцирующая цепочка 10 в одном из каналов следования сигналов меандров необходима для существенного уменьшения их длительности, что облегчает сопоставление полярностей импульсов в блоке 15.
Сигнал мультивибратора 11 проходит на схему сравнения 15 только в случае совпадения полярности импульсов на выходах 10 и 9, что означает сближение ОН и препятствия. В случае несовпадения полярностей сигнала на выходе 15 нет.
Напряжение на выходе выпрямителя 16 пропорционально частоте следования импульсов с мультивибратора 11, т. е. частоте колебаний на выходе детектора 4, а, следовательно, относительной скорости ОН (причем только в том случае, если ОН и препятствие сближаются).
Напряжение на выходе выпрямителя 12 пропорционально амплитуде принимаемого сигнала с детектора 5, т. е. дальности до препятствия.
Вычислитель 17 обеспечивает в случае нарушения неравенства (2:36) подачу сигнала, воздействующую на тормозную систему ОН и на привод двигателя.
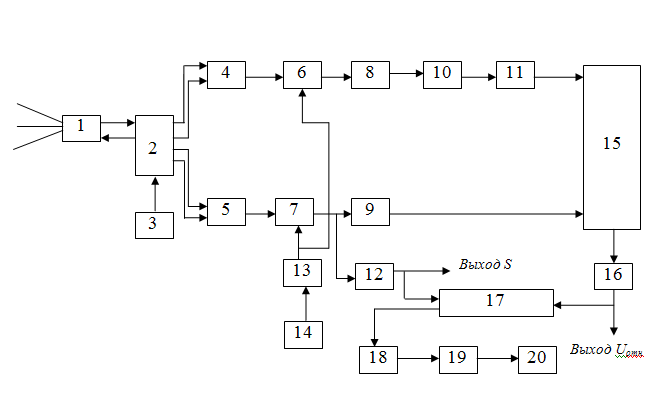
Рис. 2.24 Функциональная схема СПС на базе доплеровского измерителя скорости и расстояния.
| Выход S |
1 - антенна;
2 - волновод;
3 - передатчик;
4,5 - детекторы;
6, 7 - усилители;
8, 9 - схемы формирования меандра;
10 - дифференцирующая цепь;
11 - моностабильный мультивибратор;
12, 16 - выпрямители;
13 - устройство управления усилителем;
14 - прерыватель двигателя ОН;
15 - схема сравнения фаз;
17 - вычислитель;
18 - пороговое устройство;
19 - устройство управления приводом ОН;
20 - тормозное устройство ОН.
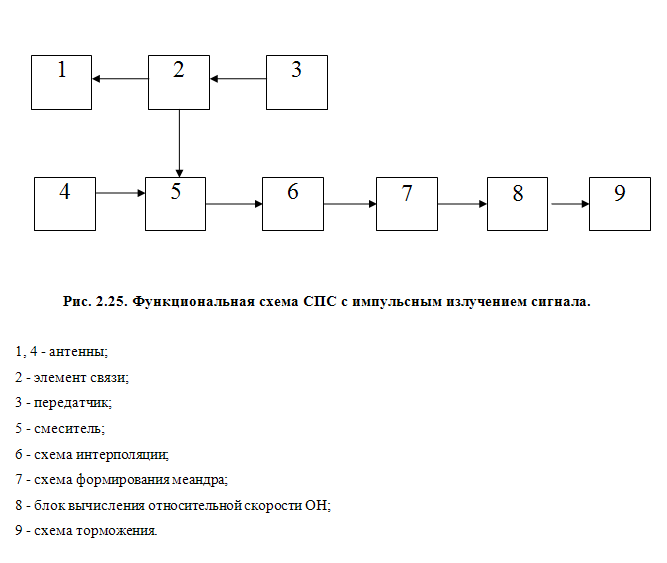
Сравнительно простой и недорогой системой , позволяющей в заданном диапазоне дальностей фиксировать превышение относительной скорости ОН, являются СПС с импульсным излучением сигнала (рис. 2.25). Передатчик 3 формирует радиоимпульсы длительности t0 излучаемые антенной 1. Через элемент связи 2 часть энергии излучаемого сигнала поступает на смеситель 5, на второй вход которого приходит принимаемый антенной 4 отраженный от препятствия сигнал. На выходе смесителя 5 появляется сигнал в том случае, если препятствие находится от ОН на расстоянии  , где С - скорость распространения излучаемого сигнала. Поэтому, изменяя τ0, можно изменять максимальную дальность действия СПС. Колебания на выходе смесителя 5 представляют собой последовательность видеоимпульсов, модулированную по амплитуде функцией sin fg· t ( где fg - доплеровская частота). На выходе схемы интерполяции 6 соответственно имеем колебание вида sin fg· t, а на выходе схемы формирования меандра 7 - последовательность разнополярных импульсов с периодом 1/ fg.
, где С - скорость распространения излучаемого сигнала. Поэтому, изменяя τ0, можно изменять максимальную дальность действия СПС. Колебания на выходе смесителя 5 представляют собой последовательность видеоимпульсов, модулированную по амплитуде функцией sin fg· t ( где fg - доплеровская частота). На выходе схемы интерполяции 6 соответственно имеем колебание вида sin fg· t, а на выходе схемы формирования меандра 7 - последовательность разнополярных импульсов с периодом 1/ fg.
Блок вычисления скорости 8 в соответствии с величиной 1/ fg определяет относительную скорость движения ОН. Схема торможения осуществляет необходимые управляющие воздействия на органы торможения ОН.
Максимальная дальность действия РЛС S max до препятствия, при которой обнаружение проводится с заданной вероятностью, определяемая энергетическими характеристиками приемника и передатчика, рассчитывается по формуле:
 (2.43)
(2.43)
где Ризл. - мощность, излучаемая передатчиком;
Na = Ka No - эффективная площадь антенны :
Nэ - эффективная площадь рассеивания препятствия;
l - длина волны излучаемого сигнала;
N0 - площадь антенны;
ка - коэффициент использования апертуры, равный для параболических антенн » 0,8.
Рпр min - пороговая чувствительность;
к - коэффициент различимости, равный отношению необходимой мощности принятого сигнала к пороговой чувствительности приемника, обеспечивающий заданную вероятность обнаружения.
Максимальная дальность определяется без учета влияния тумана, осадков в виде дождя, снега, града. Поэтому предельная дальность обнаружения будет зависеть от величины затухания радиоволн, а также от обратного рассеивания радиоволн частицами осадков, которое приводит к потере чувствительности радиолокатора и уменьшению дальности обнаружения. С учетом потерь принимают  гарантированное значение Sr max меньше расчетного Smax:
гарантированное значение Sr max меньше расчетного Smax:
 - при линейной поляризации
- при линейной поляризации
 - при круговой поляризации
- при круговой поляризации
Ширина зоны обнаружения радиолокационного обнаружителя, как ширина диаграммы направленности θ по половинной мощности на заданном расстоянии S не должна превышать ширины полосы движения b. Условие невосприимчивости локатора к объектам навстречной полосе движения запишется в виде:
 , (2.44)
, (2.44)
где b и S - в метрах; θ – в градусах.
Диаметр антенны Да для зеркальных антенн связан с длиной волны l излучаемого сигнала зависимостью
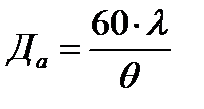 (2.45)
(2.45)
где Да и l - в метрах; θ – в градусах.
Для обеспечения нормальной работы СПС в условиях движения на участках дорог, имеющих кривизну, необходимо управление направлением излучения приемо-передающих антенн относительно продольной оси ОН. На рис .2.26 показано, что зона излучения диаграмм направленности при кривизне дороги не охватывает полотно дороги и может захватить препятствия на обочине, что приведет к ложному срабатыванию СПС. Для исключения эффекта ложного срабатывания необходимо изменять направление излучения в зависимости от кривизны полосы дороги и дальности S действия СПС на угол g (см рис.2.27)
 при R > 0 ;
при R > 0 ;
 при R < 0
при R < 0
 (2.46),
(2.46),
где
 ;
; 

Рис. 2.26. Направление излучения совпадает с направлением продольной оси ОН.
b-ширина полосы движения на дороге.


Рис.2.27. Изменение направления излучения в зависимости от кривизны полосы движения дороги.
g - угол между продольной осью ОН и направлением излучения;
R - радиус кривизны полосы движения дороги.
Кроме того, при наличии на обочине постоянных протяженных строений (ограждение, здания и т. п.) также возможны ложные срабатывания СПС. Принцип исключения ложных срабатываний в этом случае состоит в том, что при этом измеряемое СПС расстояние до таких препятствий остается постоянным в отличие от расстояний до препятствий , находящихся на полосе движения дороги (см. рис. 2.28). По такому признаку (S=const) такие ложные сигналы не учитываются.

Рис. 2.28. Направление излучения на повороте радиусом R1
2.4. Системы определения местоположения ОН.
Навигация-наука о методах и средствах, обеспечивающих вождение ОН из одной точки пространства в другую по траекториям, которые обусловлены характером выдачи, временем ее выполнения и условиями окружающей обстановки.
Системы навигации являются теми техническими средствами, которые вырабатывают необходимую информацию для решения навигационных задач. Вся информация, используемая или вырабатываемая навигационными системами для обеспечения навигации ОН, называется навигационной информацией.
Классификацию навигационных систем проводят по признакам:
-общие признаки: область использования, назначение, объем вырабатываемой информации, режимы использования, степень автономности, используемые методы навигации, методы получения первичной информации, уровень автоматизации;
-частные признаки: особенности принципа действия, способ воспроизведения измеряемой величины и др.
Так по назначению измерители навигационной информации классифицируются на измерители: координат, скорости, ускорения, углов, угловых скоростей и ускорений.
По методам получения первичной информации навигационные устройства подразделяют на одометрические, инерциальные, астрономические, магнитные, радиотехнические, спутниковые, корреляционные (Рис.2.29):
Методы счисления пути, основанные на измерении составляющих вектора ускорения или скорости движения объекта и интегрирования во времени этих составляющих известны как инерциальные и одометрические методы, соответственно.
Позиционныые методы навигации основаны на измерении физических величин, дающих линию или поверхность положения. Для определения 2-х или 3-х координат местонахождения объекта требуется иметь, соответственно, 2 или 3 взаимно пересекающиеся поверхности положения.
Обзорно-сравнительные методы основаны на обзоре окружающей местности и сравнении ее изображения с картой или системой ориентиров, заложенных в памяти.
Степень автономности навигационных устройств определяется относительным объемом используемой внешней информации. Чем меньше используется внешняя информация, тем более автономны навигационные устройства.
Для оценки качества и эффективности СН используют критерии: степень навигационного обеспечения; диапазон измерения, погрешность измерений, чувствительность, динамическая характеристика, приспособленность к условиям эксплуатации, надежность, живучесть, экономичность, удельная материалоемкость.
Обобщенной характеристикой СН является эффективность, определяемая степенью приспособленности навигационной системы к выполнению навигационных задач с требуемой точностью, надежностью, в течении заданного времени и в определенных условиях применения.
2.4.1.Одометрические навигационные системы ( ОНС).
Одометрические системы навигации в зависимости от целевого назначения объекта, на котором они применяются, решают первую, вторую и третью задачи.
Первая навигационная задача (основная):определение координат Χ и Υ местонахождения подвижного объекта и его дирекционного угла α.
Вторая навигационная задача: вычисление текущего направления на заданный пункт назначения αпн и расстояния Sпн до этого пункта.
Третья навигационная задача: вычисление координат Χц и Yцнаблюдаемых целей.
На Рис.2.30. показано определение прямоугольных координат Χ и Υ машины при движении ее по участку местности. Примем, что за небольшой отрезок времени Δt1 машина перемещается из точки 0 в точку 1, и за Δt2– из точки 1 в точку 2; при этом скорость машины V1г и V2г, а также углы α1 и α2 на отрезках пути ΔS1г и ΔS2г остаются неизменными, а криволинейный маршрут заменяется ломанным.


Тогда приращение координат на этих отрезках будут:
 1 =V1г
1 =V1г  t1
t1  cos
cos  1=
1=  S1г cos 1;
S1г cos 1;
2=V2г t2 cos 2= S2г cos 2;
……………………………………………
Xn=Vnг tn cos n= Snг cos n
n n  n
n
 Xi= Viг ti cos i=
Xi= Viг ti cos i=  Siг cos i;
Siг cos i;
i=1 i=1 i=1
Y1=V1г t1 sin 1= S1г sin 1;
Y2=V2г t2 sin 2  S2г sin 2;
S2г sin 2;
…………………………………………
Yn=Vnг tn sin n= Snг sin n
n n n
Yi = Viг ti sin i = Siг sin i;
i=1 i=1 i=1
Таким образом, координаты машины Xи Y в любой текущий момент времени могут быть получены алгебраическим суммированием исходных координат Xисх и Yисх с приращениями координат ΣΔΧi и ΣΔΥi , которые в общем случае определяются интегралами:
n t
X =Xисх+  Siг cos i=Xисх+
Siг cos i=Xисх+  V cos
V cos  cos dt;
cos dt;
i=1 0
n t (2.46)
Y=Yисх  Siг sin i=Yисх+ V cos sin dt;
Siг sin i=Yисх+ V cos sin dt;
i=1 0
Так как Vг  V cos
V cos  , где - угол подъема (или спуска) профиля местности.
, где - угол подъема (или спуска) профиля местности.
Вторая навигационная задача решается в тех случаях, когда заданы координаты пункта назначения.
При наличии аппаратуры, решающей первую навигационную задачу, представляется возможность определить направление пн движения в заданный пункт назначения, и вычислить оставшиеся до него расстояния Sпн. Принцип решения второй навигационной задачи показан на Рис. 2.31.
Из - ка АВС
Sпн=√ ( 2пн+  2пн) = √((
2пн) = √((  пн - )2+(
пн - )2+(  пн - )2);
пн - )2);
(2.47.)
пн= arctg( пн/ пн) = arctg(Yпн-Y)/(Xпн-X);
Функционально-логическая схема приведена на Рис. 2.32.
Входными данными для решения задачи служет текущие координаты X и машины и координаты пункта назначения Xисх и Yисх . Выходной информацией является направление пн на пункт назначения и расстояние Sпн до него.(Рис. 2.32.)
Внекоторых случаях вычисляется не расстояние Sпн ,а разность координат до пункта назначения.
В любой точке маршрута движения А (Рис.2.31.)оставшиеся разности координат будут определяться соотношениями:
пн  пн исх - ; пн
пн исх - ; пн  пн исх - .
пн исх - .
Функционально-логическая схема для такого случая показана на Рис.2.33.

