|
|
Основы объектного программирования в системе турбо-паскаль
Объект в ТурбоПаскале - это структура данных, содержащая поля данных различных типов и заголовки методов и обобщающая структуру «Запись» (record). Синтаксис описания объекта:
<ИмяПотомка>=оbjесt<ИмяПредка> поле;
поле; … метод; … метод; end;
В отличие от записи полями объекта могут быть, кроме данных, еще и методы, обрабатывающие эти данные
Метод- это процедура или функция, объявленные внутри описания объекта. Синтаксис описания метода:
procedure <Заголовок>(<Параметр1>, <Параметр2>:integer),
Метод имеет доступ к полям данных объекта, не требуя передачи их ему в виде параметров
Объявление метода внутри объявления объектного типа содержит только заголовок. Тело метода определяется вне объявления объекта. Его заголовок должен содержать имя объекта, которому принадлежит метод. Например:
procedure <ТипОбъекта.Метод>
(<Параметр1>, <Параметр2> : integer);
Begin … … еnd;{Метод}
Методы подразделяют на статические и виртуальные. Виртуальный метод отличается от статического тем. что реализующий его код подсоединяется к исполняемой программе не в процессе компиляции, а в процессе выполнения,
Смысл объектно-ориентированного программирования заключается в работе с полями объекта через его методы.
Полиморфизм. Предположим, надо создать объект «кружок». Очевидно, что новый объект должен иметь предком объект Point, обладая всеми его свойствами, кроме того. быть больше по размеру. Однако, ясно, что «высветить» точку и закрашенную окружность не удастся одними и теми же командами. Турбо-Паскаль разрешает сохранить потомку имя родительского метода, «перекрывая» его. Чтобы перекрыть родительский метод, надо просто задать его с тем же именем, но с другим телом (кодом) и, если необходимо, с другим набором параметров. Такой метод делается виртуальным и к его объявлению добавляется слово virtual. Применение виртуальных методов налагает ограничения на процедуры инициализации, которые должны записываться с зарезервированным словом constructor и иметь общее имя Init
Каждый отдельный экземпляр объекта должен инициализироваться с помощью отдельного вызова конструктора
Для очистки и удаления динамически распределенных объектов существует специальная процедура destructorDone.
Деструктор комбинирует шаг освобождения памяти в «куче» с некоторыми другими задачами. Метод деструктора может быть пустыу), поскольку работу выполняет не только код тела, но и код, генерируемый Турбо-Паскалем в ответ на зарезервированное слово destructor.
 Поскольку движение по вертикали происходит под действием постоянной силы тяжести, то оно является равнозамедленным до достижения верхней точки на траектории и равноускоренным - после нее; движение же по горизонтали является равномерным. Из формул равноускоренного движения vy = v
Поскольку движение по вертикали происходит под действием постоянной силы тяжести, то оно является равнозамедленным до достижения верхней точки на траектории и равноускоренным - после нее; движение же по горизонтали является равномерным. Из формул равноускоренного движения vy = v  -gt; раз в верхней точке vy = 0, то время достижения верхней точки на траектории
-gt; раз в верхней точке vy = 0, то время достижения верхней точки на траектории
 Высота этой точки
Высота этой точки
 Полное время движения до падения на землю 2
Полное время движения до падения на землю 2  ; за это время, двигаясь равномерно вдоль оси х со скоростью v
; за это время, двигаясь равномерно вдоль оси х со скоростью v  , тело пройдет путь
, тело пройдет путь
 Для нахождения траектории достаточно из текущих значений x и у исключить t:
Для нахождения траектории достаточно из текущих значений x и у исключить t:
 следовательно,
следовательно,
 (7.11)
Уравнение (7.11) - уравнение параболы.
Полученные формулы могут, в частности, послужить для тестирования будущей компьютерной программы. При достаточно большой начальной скорости сопротивление воздуха может значительно изменить характер движения. Прежде чем выписывать уравнения, вновь оценим, какая из составляющих силы сопротивления - линейная или квадратичная по скорости - дает больший вклад в эту силу, и нельзя ли одной из этих составляющих пренебречь. Оценку проведем для шарика; по порядку величины оценка не зависит от формы тела. Итак, шарик радиусом r ≈ 0,1 м, движущийся со скоростью ~ 1 м/с, испытывает в воздухе линейную (стоксову) силу сопротивления
(7.11)
Уравнение (7.11) - уравнение параболы.
Полученные формулы могут, в частности, послужить для тестирования будущей компьютерной программы. При достаточно большой начальной скорости сопротивление воздуха может значительно изменить характер движения. Прежде чем выписывать уравнения, вновь оценим, какая из составляющих силы сопротивления - линейная или квадратичная по скорости - дает больший вклад в эту силу, и нельзя ли одной из этих составляющих пренебречь. Оценку проведем для шарика; по порядку величины оценка не зависит от формы тела. Итак, шарик радиусом r ≈ 0,1 м, движущийся со скоростью ~ 1 м/с, испытывает в воздухе линейную (стоксову) силу сопротивления
 и квадратичную силу сопротивления
и квадратичную силу сопротивления
 Величины F1 и F2 сопоставимые (как принято говорить, «одного порядка», так как они различаются менее, чем в 5 раз). При увеличении размера тела F2 растет быстрее, чем F1 (F1 ~ r, F2 ~ r2), при увеличении скорости F2 также растет быстрее, чем F1 (F1 ~ v, F2 ~ v2). Таким образом, если мы моделируем движение брошенного мяча, камня, то необходимо в уравнениях удерживать
изучаемого движения есть множество вариантов, определяемых наборами значений параметров, входящих в уравнения (7.12), (7.13) или являющихся для них начальными условиями: k1, k2, m, g, v0, а. После обезразмеривания переменных появляются безразмерные комбинации параметров - в данном случае a, b, α - фактически определяющие характер движения. Если мы изучаем два разных движения с разными размерными параметрами, но такие, что а, b и α одинаковы, то движения будут качественно одинаковы. Число таких комбинаций обычно меньше числа размерных параметров (в данном случае вдвое), что также создает удобство при полном численном исследовании всевозможных ситуаций, связанных с этим процессом. Наконец, как уже отмечалось, величины Vx, Vy, X, Y, τ физически легче интерпретировать, чем их размерные аналоги, так как они измеряются относительно величин, смысл которых очевиден. Прежде чем предпринимать численное моделирование, отметим, что при учете лишь линейной составляющей силы сопротивления модель допускает аналитическое решение. Система уравнений (7.14) при b = 0достаточноэлементарно интегрируется и результаты таковы:
Величины F1 и F2 сопоставимые (как принято говорить, «одного порядка», так как они различаются менее, чем в 5 раз). При увеличении размера тела F2 растет быстрее, чем F1 (F1 ~ r, F2 ~ r2), при увеличении скорости F2 также растет быстрее, чем F1 (F1 ~ v, F2 ~ v2). Таким образом, если мы моделируем движение брошенного мяча, камня, то необходимо в уравнениях удерживать
изучаемого движения есть множество вариантов, определяемых наборами значений параметров, входящих в уравнения (7.12), (7.13) или являющихся для них начальными условиями: k1, k2, m, g, v0, а. После обезразмеривания переменных появляются безразмерные комбинации параметров - в данном случае a, b, α - фактически определяющие характер движения. Если мы изучаем два разных движения с разными размерными параметрами, но такие, что а, b и α одинаковы, то движения будут качественно одинаковы. Число таких комбинаций обычно меньше числа размерных параметров (в данном случае вдвое), что также создает удобство при полном численном исследовании всевозможных ситуаций, связанных с этим процессом. Наконец, как уже отмечалось, величины Vx, Vy, X, Y, τ физически легче интерпретировать, чем их размерные аналоги, так как они измеряются относительно величин, смысл которых очевиден. Прежде чем предпринимать численное моделирование, отметим, что при учете лишь линейной составляющей силы сопротивления модель допускает аналитическое решение. Система уравнений (7.14) при b = 0достаточноэлементарно интегрируется и результаты таковы:
 (7.14)
Исключая из двух последних формул время, получаем уравнение траектории:
(7.14)
Исключая из двух последних формул время, получаем уравнение траектории:
 Заметим, что эта формула не из тех, которые привычно визуализируются, например, по сравнению с совершенно отчетливой формулой (7.11), и здесь компьютер может быть полезен в том, чтобы составить ясное представление о влиянии линейной части силы сопротивления на изучаемое движение
Заметим, что эта формула не из тех, которые привычно визуализируются, например, по сравнению с совершенно отчетливой формулой (7.11), и здесь компьютер может быть полезен в том, чтобы составить ясное представление о влиянии линейной части силы сопротивления на изучаемое движение
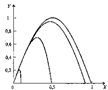 Рис. 7.8. Семейство траекторий при α = 45°
и значениях α, равных 0,01; 0,1; 1 и 10 (кривые - справа налево)
На рис. 7.8 приведены траектории четырех движений с разными значениями параметра α, характеризующего трение. Видно, как сильно оно влияет на движение - его форму, расстояния по вертикали и горизонтали. Общее исследование при произвольных значениях а и b поможет выполнить приведенная ниже программа.
Фактически представлены две программы: при активизации первого или второго блока. В первом случае она выдает результаты численного моделирования в виде таблицы значений безразмерных скоростей и координат при фиксированном наборе параметров а, b и α, значения которых устанавливаются в разделе определения констант. При взятии в фигурные скобки первого блока и активизации второго (т.е. снятия фигурных скобок)
Рис. 7.8. Семейство траекторий при α = 45°
и значениях α, равных 0,01; 0,1; 1 и 10 (кривые - справа налево)
На рис. 7.8 приведены траектории четырех движений с разными значениями параметра α, характеризующего трение. Видно, как сильно оно влияет на движение - его форму, расстояния по вертикали и горизонтали. Общее исследование при произвольных значениях а и b поможет выполнить приведенная ниже программа.
Фактически представлены две программы: при активизации первого или второго блока. В первом случае она выдает результаты численного моделирования в виде таблицы значений безразмерных скоростей и координат при фиксированном наборе параметров а, b и α, значения которых устанавливаются в разделе определения констант. При взятии в фигурные скобки первого блока и активизации второго (т.е. снятия фигурных скобок)
 Рис. 7.10. Графики зависимости V(τ) и Y(X) при решении задачи о полете тела, брошенного под углом к горизонту, без учета сопротивления воздуха (скорость изменяется от 1 и вновь достигает значения 1; траектория - парабола) и с учетом сопротивления воздуха (конечная скорость меньше 1, и траектория - далеко не парабола) (а = 1, b = 1)
С помощью приведенной выше программы можно провести полное исследование модели в широком диапазоне значений параметров и составить качественное представление об их влиянии на изучаемое движение. Некоторые результаты иллюстрируются рис. 7.11,7.12.
Рис. 7.10. Графики зависимости V(τ) и Y(X) при решении задачи о полете тела, брошенного под углом к горизонту, без учета сопротивления воздуха (скорость изменяется от 1 и вновь достигает значения 1; траектория - парабола) и с учетом сопротивления воздуха (конечная скорость меньше 1, и траектория - далеко не парабола) (а = 1, b = 1)
С помощью приведенной выше программы можно провести полное исследование модели в широком диапазоне значений параметров и составить качественное представление об их влиянии на изучаемое движение. Некоторые результаты иллюстрируются рис. 7.11,7.12.
 Рис. 7.11. Влияние параметра а на движение тела, брошенного под углом к горизонту, при b = 0,1 (слева) и при b = 1 (справа); α = π/4 (а = 0,01; 0,1; 1; 10; кривые на рисунках соответственно располагаются справа налево)
Рис. 7.11. Влияние параметра а на движение тела, брошенного под углом к горизонту, при b = 0,1 (слева) и при b = 1 (справа); α = π/4 (а = 0,01; 0,1; 1; 10; кривые на рисунках соответственно располагаются справа налево)
 Рис. 7.12. Влияние параметра b на движение тела, брошенного под углом к горизонту, при a = 0,1 (слева) и при а = 1 (справа); α = π/4 (b = 0,01; 0,1; 1; 10; кривые на рисунках соответственно располагаются справа налево)
Рис. 7.12. Влияние параметра b на движение тела, брошенного под углом к горизонту, при a = 0,1 (слева) и при а = 1 (справа); α = π/4 (b = 0,01; 0,1; 1; 10; кривые на рисунках соответственно располагаются справа налево)
| 1 2 3 | var a: array [0..100] of integer; |
Сначала мы, как и обычно, указываем название нашего массива. Затем, после "array", мы указываем диапазон индексов в массиве, т.е. в данном случае мы создали 101 элементов массива с заданными индексами. И затем естественно указываем тип элементов массива, а именно пишем после "of" тип "integer", т.е. элементы массива целочисленные.
Теперь как же обратиться к элементам массива непосредственно из кода, т.е. работать с этими элементами как с обыкновенными переменными? Делается это предельно просто. Обратиться к любому элементу массива можно следующим образом:
| 1 2 3 | a[1]:=100; a[99]:=200; |
В квадратных скобках мы указываем индекс самого элемента массива. Очень важно учитывать, что введенный индекс, по которому мы хотим обратиться к элементу массива, должен быть в указанном при объявлении массива диапазоне, иначе программа во время своей работы выдаст нам ошибку. Также, в качестве индекса может выступать и другая любая переменная типа integer (а также и различные примитивные математические операции), например так:
| 1 2 3 | a[i]:=100; a[i+10]:=200; |
В Java массивы являются объектами. Это значит, что имя, которое даётся каждому массиву, лишь указывает на адрес какого-то фрагмента данных в памяти. Кроме адреса в этой переменной ничего не хранится. Индекс массива, фактически, указывает на то, насколько надо отступить от начального элемента массива в памяти, чтоб добраться до нужного элемента.
Чтобы создать массив надо объявить для него подходящее имя, а затем с этим именем связать нужный фрагмент памяти, где и будут друг за другом храниться значения элементов массива.
Возможные следующие варианты объявления массива:
тип[] имя; тип имя[];Где тип — это тип элементов массива, а имя — уникальный (незанятый другими переменными или объектами в этой части программы) идентификатор, начинающийся с буквы.
Примеры:
int[] a; double[] ar1; double ar2[];В примере мы объявили имена для трёх массивов. С первом именем a сможет быть далее связан массив из элементов типа int, а с именами ar1 и ar2 далее смогут быть связаны массивы из вещественных чисел (типа double). Пока мы не создали массивы, а только подготовили имена для них.
Теперь создать (или как ещё говорят инициализировать) массивы можно следующим образом:
a = new int[10]; // массив из 10 элементов типа intint n = 5; ar1 = new double[n]; // Массив из 5 элементов double
ar2 = {3.14, 2.71, 0, -2.5, 99.123}; // Массив из 6 элементов типа double
То есть при создании массива мы можем указать его размер, либо сразу перечислить через запятую все желаемые элементы в фигурных скобках (при этом размер будет вычислен автоматически на основе той последовательности элементов, которая будет указана). Обратите внимание,
применения в данном алгоритме, можно свести число парметров к одному (какому?), а не двум.