|
|
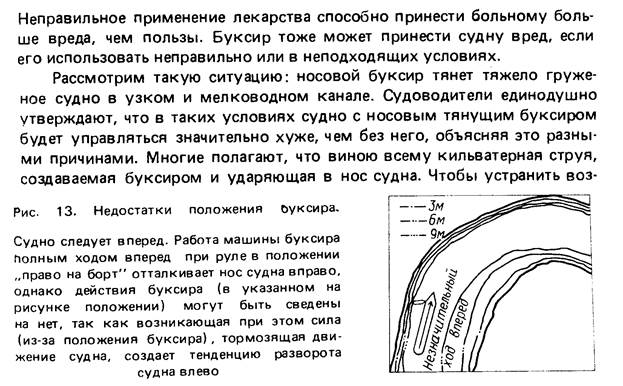
Прохождение поворота с глубокой водой со стороны мыса

Отрицательное влияние носового буксира на глубоко сидящее
Судно
действие струи, максимально удлиняют буксирный трос. Однако кильватерная струя, действительно отрицательно влияющая на управляемость судна, все же не заслуживает таких серьезных обвинений. Здесь необходимо вспомнить уже известную нам зависимость — чем меньше инерция переднего хода, тем меньше присасывание, и наоборот. Правильность этого утверждения признается далеко не всеми, поэтому приведем два примера в его защиту.
1. Плохо управляющееся судно с незначительным клиренсом под килем следует в узком канале, сила руля превосходит силу присасывания при условии, что судно идет только самым малым ходом вперед. Если же оно начнет двигаться быстрее, то потеряет управляемость. Носовой буксир, хотя его машина и работает только малым ходом, увеличит инерцию переднего хода судна, т. е. его скорость, поскольку само судно идет медленно, а это небольшое увеличение скорости за счет тяги буксира создаст сильное присасывание.
2. Носовой буксир отсутствует. Судно, следующее только собственным ходом 3 уз , будет управляться лучше, чем при собственном ходе 2 уз и дополнительном ходе 1 уз за счет какого-либо механизма, двигающегося по берегу, например, „электрического мула". В последнем случае кильватерная струя буксира отсутствует, но управляемость судна хуже, чем при движении со скоростью 3 уз за счет собственной
машины. Если судно использует только свою машину, его винтовая струя оказывает большое воздействие на руль.
В противовес сказанному выше можно заявить, что такое судно иногда способно продолжить движение без рыскания на расстояние многих миль, причем машина будет работать полным ходом вперед. В подтверждение этому можно привести многочисленные примеры.
Так, как уже говорилось в § 27, тяжело груженое судно, углубившееся на несколько сантиметров в ил, управляется лучше, чем если бы оно не касалось грунта. Судно как бы ползет по илу и не представляет собой опасности для других судов, что является существенным преимуществом. Мы также заранее предположили, что рассматриваемое судно будет на плаву. Однако следует помнить, что судно с очень незначительной глубиной под килем и не имеющее хода относительно воды будет часто проседать, если машина работает полным ходом, и тяжело ползти по грунту.
Другим примером может служить следующая ситуация. Машины двухвинтового теплохода работает на минимально возможный ходу. Независимо от наличия буксира спереди, судно, пройдя расстояние, равное нескольким длинам корпуса, получает слишком большую инерцию, чтобы им можно было управлять в узком канале. Если к его раковине ошвартован буксир, а другой буксир тянет спереди, судном можно управлять, когда его машина не работает. Однако даже при наличии этих двух буксиров судно теряет управляемость, если его машина в течение нескольких минут работает на передний ход. Практика дает возможность сделать вывод, что именно дополнительная скорость, сообщаемая судну буксиром, а не его кильватерная струя, является причиной потери судном управляемости,