|
|
КИХ-фильтрларды жобалау
Дискретті беріліс функциясымен сипатталатын БИХ-фильтрларға қарағанда, КИХ-фильтрлар жалғыз бір вектормен b ғана сипатталады. Дискретті беріліс функциясының алымы 1-ге тең.
MatLAB-та түрлі типтегі терезелерді есептеу үшін мынадай функциялар:
Мысал келтірейік. 0.35£w/wN£0.65: жол аралығындағы 24 ретті сызықты КИХ-фильтді есептейік
b = fir1(48, [0.35 0.65]);
freqz(b, 1, 512)
| bartlett(n) | Бартлетта терезесінің n элементтерінен вектор-баған құрады |
| blackman(n) | Блэкман терезесінің n элементтерінен вектор-баған құрады |
| boxcar(n) | Тікбұрышты терезенің n элементтерінен вектор-баған құрады |
| chebwin(n, r) | Чебышев терезесінің n элементтерінен вектор-баған құрады |
| hamming(n) | Хемминг терезесінің n элементтерінен вектор-баған құрады |
| hanning(n) | Хеннинг терезесінің n элементтерінен вектор-баған құрады |
| kaizer(n,beta) | Кайзер терезесінің n элементтерінен вектор-баған құрады, мұндағы beta Фурье түрлендіру терезесіндегі өшу параметрін анықтайды |
| traing(n) | Үшбұрышты терезенің n элементтерінен вектор-баған құрады |
Мысал келтірейік. 0.35£w/wN£0.65: жол аралығындағы 24 ретті сызықты КИХ-фильтді есептейік
b = fir1(48, [0.35 0.65]);
freqz(b, 1, 512)
30 ретті екіжолақты фильтрді есептейік:
f = [0 0.2 0.2 0.6 0.6 0.8 0.8 1];
m = [1 1 0 0 0.5 0.5 0 0];
b = fir2(30, f, m);
[h, w] = fregz(b, 1, 512);
plot (f, m, w/pi, abs (h))
grid
title (`АЧХ КИХ-фильтра (процедура fir2)`)
xlabel (`Нормализованная частота`)
ylabel (`А Ч Х`)
design_flag` параметрі 3 мағынада бола алады:
· trace – нәтижені мәтіндік кесте арқылы шығаруды қамтамасыз;
· plots –топтық кідіріс,нолдер мен полюстерді және АЖС-ны графиктік түрде бейнелеу үшін;
· both – нәтижені мәтіндік және графиктік түрде суреттеу үшін.
fir2процедурасымен салыстыру үшін алынған АЖС графигін құрайық:
[h, w] = freqz(b, 1, 512)
plot ( w/pi, abs (h))
grid
title (`АЧХ КИХ-фильтра (процедура fircls)`)
xlabel (`Нормализованная частота`)
ylabel (`А Ч Х`)
Флаг `ftype` екі мағынаның біреуінде болуы мүмкін:
· hilbert – бұл жағдайда сызықты фазада және тақ симметриядағы фильтрларды жобалайды;
· differentiator – арнайы өлшеу әдістерін қолданып, фильтрлерді синтездейді.
17 ретті сызықты фильтрді жобалауға мысал:
f = [0.0.3 0.4 0.6 0.7 1];
a = [0 0 1 1 0 0];
b = remez(17, f, a);
[h,w]=fregz(b,1,512)
plot (f, a, w/pi, abs (h)), grid
title (`АЧХ КИХ-фильтра (процедура remez)`)
xlabel (`Нормализованная частота`)
ylabel (`AЧХ`)
Жұмысты орындау реті
1. freqs процедурасын пайдаланып АЖС және ФЖС графигін сал.
2. freqz процедурасын пайдаланып сандық фильтр сипаттамасын сал
3. Фильтр көмегімен пайдалы сигналды құр, Ts=0.001с периодымен (filter) процедура көмегімен.
4. filtfilt командасымен берілген процедураны орында. Салыстырып талды.
5. Ts=0.01, Ts=0.001 шама мәндерімен Гаусстың ақ шуын қалыптастыр. Салыстырып талды.
Бақылау сұрақтары
1. fregs және процедуралары қандай функцияны орындайды. Бұл процедуралар нені сипаттайды.
2. Фильтрдің беріліс функциясын және дискретті беріліс функциясын сипатта.
3. MatLab жүйесінде сигналдардың фильтрациясы қандай процедуралармен іске асырылады?
4. Фильтрлер қалай қалыптасады
5. Сигналдар фильтрдан кейін қалпына келеме, не кедергі жасайды?
6. «Ақ Гаусстық шу» дегеніміз не және ол қалай қалыптасады.
№5 зертханалық жұмыс
ДИСКРЕТТІ ХАБАРЛАМА КӨЗІНІҢ ТИІМДІ КОДТТАУ ӘДІСІН ЗЕРТТЕУ
Жұмыстың мақсаты: тиімді кодттау әдісін құру және ерекшеліктерінұйрену, сонымен қатар ақпараттық сипаттамасы.
Жұмыстың орындалуы
Калман Фильтрі
Тапсырма қою
Басқару нысанының моделі мына түрде зерттеледі
 (6.1)
(6.1)
Белгілі u шығысы бар және w кірісі бойынша ауытқуы, келесі сипаттамалары бар «ақ» дыбыс болып табылады:
 (6.2)
(6.2)
Нысанның ауыспалы күй векторын бағалау үшін бақылаушының синтезін орындау қажет:
 . (6.3)
. (6.3)
Көп өлшемді жүйе l-кірісі және n-шығысы бар «кіріс-шығыс» түрленуі, (t, τ) импульсті ауыспалы функциясының матрицалық түрінде берілген жүйе ретінде анықталсын.
U(t) – l-фильтр кірісінің өлшемдік векторы, ал  - n-шығыстың өлшемдік векторы. Сонда және Y(t) векторларының арасындағы байланыс интегралмен анықталады
- n-шығыстың өлшемдік векторы. Сонда және Y(t) векторларының арасындағы байланыс интегралмен анықталады
 .
.
Y(t) – нөлдік математикалық күтімі және RYY(t, t ) корреляциялық функциясы бар нақты кез-келген процесс. B туындылық квадраттық матрицасының нормасын ||B|| арқылы белгілейміз және оны келесідей анықтаймыз:
 ,
,
мұнда tr (.) – із, яғни матрицаның диогональ элементтерінің қосындысы.
Көп өлшемді фильтр кірісіне пайдалы сигнал қосындысы M(t) және N(t), ретіндегі сигнал келіп түседі. Яғни,
 ,
,
мұнда M(t) және N(t) – l-RMM(t,t ) және RNN(t,t ) корреляциялық функциялары бар өлшемдік векторлар.
Кейбір жүйенің X(t) идеалды кірісі бар, ол талап етілетін шығысты анықтайды және пайдалы сигнал қатынасымен байланысты
 ,
,
мұнда KID(t, t ) – жүйенің беріліс функциясының импульс матрицасы. Қате векторын қарастырайық
 .
.
Тапсырма мынадай, яғни физикалық орындалатын қате нормасы квадратының математикалық күтімі минималды болатындай матрицалық беріліс функциясын К*(t, t ) таңдап алудан тұрады.
 , (6.4)
, (6.4)
Мұнда K(t, t ) = 0.
Қандай тапсырма тұрғанына байланысты: болжау, фильтрация немесе тегістеу KID(t, t ) идеалды жүйемен анықталады. Фильтрация тапсырмасында X(t) = M(t), т.е. KID(t, t ) = E*d (t–t ). Мұндай тапсырманы қою кезінде (6.4) орташа квадраттық қате минимумы көп өлшемді жүйе үшін Винера-Хопфа-ның жалпыланған теңдеуінен алынатын МИПФ K*(t, t ) анықталады.
 .
.
Егер жүйе кірісіне кездейсоқ сигнал Y(t) келетін болса, кең мағынасында оптималды матрицалық көп өлшемді фильтрдің беріліс функциясы W*(s) спектралды жазықтықтың рационалды матрицасын факторлау арқылы алуға болады. Стационарлы емес жағдайда Вольтердің бірінші жіктелуі интегралдық теңдеуінің шешімі күрделі қиындықты тудырады.
Калман өзінің жұмыстарында Винердің көп өлшемді фильтрациясының тапсырмасын қоюды модификациялады, оған күй жазықтығындағы мәселелер формасын берді. Осындай модификация нәтижесінде Калман фильтрі алынды, ол бағалауға жататын сигнал сызықты стационарлық емес динамикалық жүйенің кіріс сигналы болып табылғандағы рекурсивті бағалау процедурасын жүзеге асырады.
Басқару нысанының белгілі кірісі u және w кірісі бойынша және n өлшемді үздіксіз моделін қарастырамыз
Ол келесі сипаттамалардан тұратын «ақ» дыбыс болып табылады:
Басқару нысанының ауыспалы күй векторының бағалау үшін бақылау синтезін орындау қажет,
Калман фильтрі оптималды шешім болып табылады, келесі теңдеумен сипатталады

Мұнда, L кері байланыс коэффициенттерінің матрицасы Риккатидің алгебралық матрицалық теңдеуінің шешімі негізінде анықталады. Мысалы, Н=0 кезінде P дисперсиясы келесі теңдеумен анықталады
AP + PAT – (PCT +GN)R-1(CP+NTGT) + GQGT = 0,
матрица L –
L = APCT(N+CPCT)-1.
Бақылаушы (3-сурет) Калман фильтрімен басқару нысанын біріктіреді.

7.1-сурет.Калман бақылаушысы
Бақылаушы Наблюдатель использует известные входы белгілі кіріс u және результаты измерений yv өлшеу нәтижесі қолданады.  ауыспалы күйдің векторын және
ауыспалы күйдің векторын және  шығысын бағалау үшін кездейсоқ ауытқуын есептейді.
шығысын бағалау үшін кездейсоқ ауытқуын есептейді.
Басқару нысанының дискретті моделі берілсін

Басқару нысанының ауыспалы күй векторының бағалау үшін бақылау синтезін орындау қажет,
.
Бұл жағдайда Калман фильтрі мына теңдеулермен сипатталады:
 ,
,
Мұнда L кері байланыс коэффициентінің матрицасы және М кері байланыс коэффициентінің жаңа матрицасы Риккати теңдеуінің алгебралық матрицалық шешімі негізінде анықталады.
Бақылаушы Калман фильтрін біріктіреді және басқару нысаны; ол u[n] кіріс және уv[n] өлшем шешімін қолданады.
Жаңа матрица кері байланыс коэффициенті М уv [n] өлшем негізінде х[n] айтуын жою үшін қолданылады
 .
.
Тізбектей орындау
Калман фильтр синтезі үшін келесі функцияны орындау қажет Control System Toolbox:
[kest, L, P] = kalman(sys, Qn, Rn, Nn)
[kest, L, P] = kalman(sys, Qn, Rn, Nn, sensors, known)
Дискретті модель үшін
[kest, L, P, M, Z] = kalman(sys, Qn, Rn, Nn)
Үздіксіз жүйе үшін Калман дискретті фильтрін синтездеу
[kest, L, P, M, Z] = kalmz(sys, Qn, Rn, Nn)
Басқару нысанын сипаттау және кездейсоқ әрекеттер жүйеде келесі түрде болуы қажет:
- Қос матрица (С, A) белгілі болуы қажет;
- Теңсіздікті орындау қажет
 ,
,
Белгілену есебімен
 .
.
Зертханалық жұмысты орындау үшін келесі іс-әрекеттерді орындау қажет:
1. Теориялық мағлұматтарды оқу.
2. MATLAB жүйесін енгізу.
3. Калмана фильтр есебін өткізу.
4. Бақылаушымен басқару жүйесінің моделдеуін орындау.
5. Негізінен алынған берілгендерді салыстыру.
6. Нөлдік емес бастапқы шарт кезінде жүйенің динамикалық графигін құру.
7. Бақылау сұрақтарына жауап беру.
8. Есепті жөндеу және жұмысты қорғау.
Әдістемелік мысал
Беріліс функциясымен жүйе үшін Калман фильтрін есептейміз

Және параметрлермен Q = 1, R = 0.01.
1. Калман фильтрін есептейміз
>> sys=ss(tf(100,[1 1 100]))
a =
x1 x2
x1 -1 -3.125
x2 32 0
b =
u1
x1 2
x2 0
c =
x1 x2
y1 0 1.563
d =
u1
y1 0
Continuous-time model.
>> [A,B,C,D]=ssdata(sys)
A =
-1.0000 -3.1250
32.0000 0
B =
C =
0 1.5625
D =
>> [A,B,C,D]=ssdata(sys)
A =
-1.0000 -3.1250
32.0000 0
B =
C =
0 1.5625
D =
>> P=ss(A, [B B], C, [D D])
a =
x1 x2
x1 -1 -3.125
x2 32 0
b =
u1 u2
x1 2 2
x2 0 0
c =
x1 x2
y1 0 1.563
d =
u1 u2
y1 0 0
Continuous-time model.
>> Kest=kalman(P,1,0.01)
a =
x1_e x2_e
x1_e -1 -30.11
x2_e 32 -41.56
b =
u1 y1
x1_e 2 17.27
x2_e 0 26.6
c =
x1_e x2_e
y1_e 0 1.563
x1_e 1 0
x2_e 0 1
d =
u1 y1
y1_e 0 0
x1_e 0 0
x2_e 0 0
I/O groups:
Group name I/O Channel(s)
KnownInput I 1
Measurement I 2
OutputEstimate O 1
StateEstimate O 2,3
Continuous-time model.
2. Бақылаушымен басқару жүйесін моделдеуді орындаймыз. Ол үшін x1 = x1, x2 = x2,  = x3,
= x3,  = x4, келесі матрицаларды енгіземіз
= x4, келесі матрицаларды енгіземіз
>> A1=[-1 -6.25 0 0; 16 0 0 0; 0 54 1 -60.2; 0 41.5 16 -41.5]
A1 =
-1.0000 -6.2500 0 0
16.0000 0 0 0
0 54.0000 1.0000 -60.2000
0 41.5000 16.0000 -41.5000
>> B1= [2 2 0; 0 0 0; 2 0 17.3; 0 0 13.3]
B1 =
2.0000 2.0000 0
0 0 0
2.0000 0 17.3000
0 0 13.3000
>> C1=[0 3.125 0 0; 0 0 0 3.125]
C1 =
0 3.1250 0 0
0 0 0 3.1250
3. Бақылаушымен басқару жүйесіне кіру u1=[u; w; v] векторы, шығысы – y1 = [y;  ] болып табылады. Мұнда y = 3.125y2, = 3.125y4. Төменде моделдеу программасының фрагменті және нәтижесі келтірілген (6.1 – 6.2-сурет).
] болып табылады. Мұнда y = 3.125y2, = 3.125y4. Төменде моделдеу программасының фрагменті және нәтижесі келтірілген (6.1 – 6.2-сурет).
t=0:0.001:5;
u=ones(size(t));
w=randn(size(t))*1000^0.5;
v=ràndn(size(t))*10^0.5;
S=ss(A1, B1, C1, 0);
u1=[u; w; v];
[y1 y4]= lsim(S, u1', t);
plot(t, y1(:,1),'-b',t,y1(:,2),':b')
plot(t, v'+y1(:,1), ':g', t,y1(:,2),'-b')
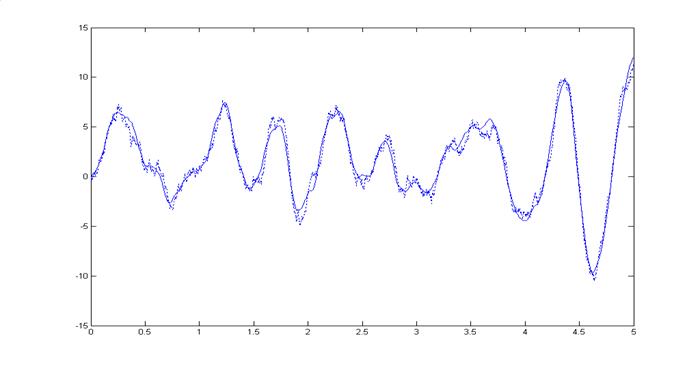
6.1-сурет. Шығыс сигналдың өлшеуіш және нақтылығын салыстыру.

6.2-сурет. Шығу жүйесіндегі шулы және нақты мәнді салыстыру.
6.1-сурет өлшеуіш және нақты сигналдарды, 6.2 –сурет өлшеулі және нақты мәнді графикті суреттейді.
Жұмыс бойынша есеп беру
Есеп жоғары оқу орындағы жөндеу қажеттіліктеріне сәйкес жөнделіп, және мыналардан тұруы керек:
1. Сыртқы бет.
2. Атауы және жұмыс мақсаты.
3. Нұсқасына сәйкес тапсырманы орындау.
4. Жұмысты орындау тәртібі және шешімі.
5. Сандық және графикалық түрде динамиканың моделдеу шешімі.
6. Анализ нәтижесі және қорытынды.
Бақылау сұрақтары
1. Калман бойынша сүзу тапсырмаларын қалыптастыру.
2. Бақылаушымен басқару жүйесінің сызбанұсқасын әкелу және оның мәнін түсіну.
3. Әдістерді қолдануды көрсету үшін жүйе көрсетілуі қажет.
4. Гаусстің“ақ дауысына” анықтама беру.
5. MATLAB ортасында Калман фильтрін синтездеу үшін интерфейс қолдану.
1. Қандай жағдайларда тиімді кодттауды пайдаланған дұрыс?
2. Тиімді кодттаудың артықшылығы және кемшілігі?
3. Тиімді кодттаудың кодттық комбинациясының орташа ұзындығы қаншаға дейін кемуі мүмкін?
4. Тиімді кодттаудың кодттық комбинациясының орташа ұзындығы қалай анықталады?
5. Шеннона-Фано әдісі бойынша кодттау ерекшелігі
6. Хаффмена әдісі бойынша кодттау алгоритмі;
7. Қандай тиімді код префикті деп аталады?
8. Код артығы деген түсінікке анықтама бер (статикалық қысу коэффициенті).
9. Қатынасты тиімділік коэффициенті деп нені атайды?
Зертханалық жұмыс №6
ПЕРИОДТТЫ СИГНАЛДАР СПЕКТРІН ЗЕРТТЕУ
Жұмыстың мақсаты: периодттй сигнал спектрін зерттеу.
Жұмыстың мазмұны
периодттй сигнал спектрінің тәуелділігін зерттеу (амплитудалаық спектр және фазалық спектр) келесі сигналдардың параметрлерінің өзгеруі кезінде
1. Сигнал периоды Т1 ;
2. Импульстар ұзақтығы tи ;
3. Сигналдың оң U1 және теріс U2 кернеулері;
4. dt сигналының координат басына жылжуы.
Жұмыс бойынша есеп беру
Есеп жоғары оқу орындағы жөндеу қажеттіліктеріне сәйкес жөнделіп, және мыналардан тұруы керек:
7. Сыртқы бет.
8. Атауы және жұмыс мақсаты.
9. Нұсқасына сәйкес тапсырманы орындау.
10. Жұмысты орындау тәртібі және шешімі.
11. Сандық және графикалық түрде динамиканың моделдеу шешімі.
12. Анализ нәтижесі және қорытынды.
Бақылау сұрақтары
1. Периодтты сигнал спектрінің анықтамасы.
2. Периодтты сигнал анықтамасы.
3. сигналдардың біріншілік параметрлерін ата. Олардың физикалық мағынасы.
4. сигналдардың екіншілік параметрлерін ата.Олардың физикалық мағынасы.
5. Периодтты сигналдардың амплитудалық спектр құрамы.
6. Периодтты сигналдардың фазалық спектр құрамы
7. Периодтты сигналдардың амплитудалық спектрмен фазалық спектр арасындағы байланыс қандай.
10 Практикалық сабақ
Тапсырма 1
Дискретті хабарламаның дискретті молдығын (избыточности) талдау
Жұмыстың мақсаты – жадымен және жадысыз дискретті хабарлама көзінің молдығын зерттеу.
Жұмысты орындау реті
1.жадыдан дискретті хабарлама көзінен энтропиясын анықтау
 ,
,
(lb x = log2 x).
2.Жадымен дискретті хабарлама көзінің коэффициентін анықта
kn = (Hmax(x) - Hn(x))/ Hmax(x).
3.Энтропияны анықта
жадысыз хабарлама көзі, бірақ символдарды беру ықтималдылығының сол шамаларымен.

Үш теңдеулі жүйе ықтималдылығын шартсыз есептеу кезінде төртінші теңдеумен толтыру керек p1+p2+p3=1, ал содан кейін ең алдымен шыққан үш теңдеудің біреуін жүйеден алып тастайды.
4. Жадысыз дискретті хабарлама көзінің молдық коэффициентін анықта
kб = (Hmax(x) - Hб(x))/ Hmax(x).
1 тапсырма бойынша есеп беру
1. Есептің қойылуы
2. жады дискретті хабарлама көзінен энтропиясы есебі.
3. Жадымен дискретті хабарлама көзінің коэффициентінің есебі.
4. Жадысыз дискретті хабарлама көзінің энтропия есебі.
5. Жадысыз дискретті хабарлама көзінің коэффициенті есебі.
6. Жұмыс бойынша қорытынды.
Бастапқы берілгендер нұсқасы
Өтпелі ықтималдылық шамасы
Кесте 2
| Нұсқа | p11 | p 21 | p12 | p22 | p13 | p23 |
| 0,1 | 0,3 | 0,2 | 0,2 | 0,3 | 0,2 | |
| 0,2 | 0,2 | 0,2 | 0,1 | 0,4 | 0,1 | |
| 0,1 | 0,3 | 0,2 | 0,3 | 0,3 | 0,3 | |
| 0,3 | 0,1 | 0,3 | 0,2 | 0,3 | 0,4 | |
| 0,2 | 0,4 | 0,1 | 0,5 | 0,3 | 0,4 | |
| 0,5 | 0,1 | 0,4 | 0,3 | 0,1 | 0,6 | |
| 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,4 | |
| 0,2 | 0,3 | 0,4 | 0,5 | 0,1 | 0,8 | |
| 0,8 | 0,1 | 0,4 | 0,4 | 0,3 | 0,6 | |
| 0,6 | 0,2 | 0,3 | 0,4 | 0,6 | 0,3 | |
| 0,3 | 0,4 | 0,6 | 0,1 | 0,7 | 0,2 | |
| 0,1 | 0,5 | 0,4 | 0,2 | 0,5 | 0,3 | |
| 0,3 | 0,2 | 0,6 | 0,1 | 0,7 | 0,2 | |
| 0,5 | 0,1 | 0,6 | 0,2 | 0,2 | 0,5 | |
| 0,3 | 0,4 | 0,5 | 0,1 | 0,8 | 0,1 | |
| 0,6 | 0,2 | 0,1 | 0,2 | 0,3 | 0,4 | |
| 0,3 | 0,3 | 0,5 | 0,2 | 0,7 | 0,1 | |
| 0,2 | 0,4 | 0,6 | 0,2 | 0,3 | 0,4 | |
| 0,3 | 0,6 | 0,1 | 0,7 | 0,5 | 0,1 | |
| 0,4 | 0,3 | 0,5 | 0,2 | 0,7 | 0,1 |
Тапсырма 2