|
|
Статическая точность
Точность преобразования ускорения в электрический сигнал акселерометрами так же, как и точность датчиков другого типа, определяется величинами смещения нуля, погрешностью полной шкалы (или чувствительности), а также температурным и временным дрейфом этих параметров. Важными составляющими погрешности являются также погрешности линейности (нелинейность) и поперечная чувствительность. Смещение нуля и чувствительность акселерометров при нормальных условиях корректируются при изготовлении. Остаточная погрешность может быть уменьшена путем калибровки и запоминания калибровочных констант в памяти микроконтроллера. Калибровка акселерометра возможна двумя способами: на вибростенде с образцовым датчиком ускорения и с использованием силы тяжести.

| 
|
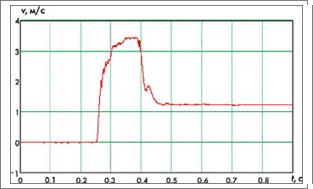
Рис. 8. Графики ускорения и скорости интегрального акселерометра в условиях сильных продольных вибраций
Использование вибростенда имеет следующие преимущества:
- возможность калибровки, в том числе и датчиков, восприимчивых только к переменному ускорению;
- возможность калибровки датчиков с ускорениями, многократно превышающими g;
и недостатки:
- требуется дорогостоящий вибростенд;
- проблема закрепления датчика при калибровке на высоких g.
Преимущества применения силы тяжести для калибровки:
- не требуется дорогостоящее оборудование;
- метод мало чувствителен к погрешности установки датчика;
и недостатки:
- можно применить только для датчиков, восприимчивых к постоянному ускорению;
- нельзя калибровать полную шкалу датчиков, способных преобразовывать большие ускорения.
Температурный дрейф смещения нуля и чувствительности также может быть скомпенсирован. Для этой цели некоторые модели (например, XMMA1000, ADXL105) снабжаются встроенными датчиками температуры.
Одной из причин нелинейности характеристики преобразования интегральных акселерометров с датчиками емкостного типа является нелинейная зависимость емкости конденсатора от расстояния между обкладками. При использовании усилителя заряда, как это сделано в XMMA1000, потенциал подвижной пластины постоянен и равен половине напряжения питания, которое мы будем считать равным 2V (см. рис. 8). В этом случае из формулы q = CV с учетом (1) следует, что приращение заряда подвижной обкладки при ее перемещении на расстояние x составит
 (2)
(2)
Как видно, зависимость приращения заряда от изменения расстояния между пластинами нелинейна. Если в акселерометре применяется усилитель напряжения (электрометрический), то заряд конденсаторов датчика меняться не будет. Тогда приращение напряжения на подвижной пластине будет линейно зависеть от изменения расстояния между пластинами:

По указанным причинам акселерометр XMMA1000 (усилитель заряда) имеет типичную погрешность линейности 1 % от полной шкалы против 0,5 % у MMAS40G (усилитель напряжения). Акселерометры семейства ADXL имеют емкостный датчик дифференциального типа, неподвижные пластины которого питаются равными, но противофазными напряжениями возбуждения V1 и V2 с частотой 1 МГц. Поэтому комплексное действующее значение напряжения на средней пластине, согласно методу двух узлов, определяется формулой:
 (3)
(3)
где — круговая частота возбуждения. С учетом того, что V1 = -V2, а

из (3) получим
 (4)
(4)
Таким образом, зависимость напряжения на подвижных пластинах датчика от перемещения получается линейной. Акселерометры семейства ADXL имеют типовую погрешность линейности 0,2 %.
В [4] в качестве еще одного источника погрешности указывается гистерезис (то есть неполная восстанавливаемость) при вибрациях и ударах. В фирменном описании микросхем никаких сведений о гистерезисе нет, но эксперименты по использованию интегральных акселерометров семейства ADXL для определения скоростей и перемещений, проведенные авторами этой статьи, показали, что при наличии вибраций большой амплитуды погрешность, обусловленная, по всей видимости, гистерезисом, может достигать совершенно недопустимых значений. По нашему мнению, этот гистерезис вызван тем, что при значительных ускорениях деформация растяжек, играющих роль пружин, может быть неупругой и при уменьшении ускорения инерционная масса либо очень медленно возвращается в исходное состояние (вязкая неупругость), либо не возвращается совсем. На рис. 8 приведены графики ускорения (а) и скорости (б) от времени акселерометра ADXL150, закрепленного на одном из концов стального стержня длиной 1,5 м, который перемещается с большими ускорениями на расстояние 0,5 м. Вследствие упругости стержня это перемещение сопровождается вибрацией довольно большой амплитуды с частотой приблизительно 300 Гц. График ускорения получен непосредственным считыванием сигнала акселерометра 12-разрядным АЦП с частотой выборки 80 кГц. График скорости является результатом численного интегрирования этих данных методом трапеций. В начале и в конце интервала наблюдения (0–0,9 с) скорость датчика равна нулю. На графике скорости (рис. 8, б), точки которого рассчитаны по данным акселерометра, погрешность конечного значения скорости составила примерно 1,25 м/с при максимальной скорости 3,5 м/с.

| 
|
Рис. 9. Графики ускорения и скорости интегрального акселерометра при пониженной вибрации
На рис. 9 приведены графики ускорения (а) и скорости (б) того же датчика при близких параметрах движения, но закрепленного на более жесткой конструкции. Движение сопровождалось значительно меньшей продольной вибрацией. Как видно, погрешность определения скорости уменьшилась во много раз.