|
|
Доплеровские измерители путевой скорости и угла сноса
Доплеровские измерители путевой скорости и угла сноса (ДИСС) предназначены для непрерывного определения путевой скорости и угла сноса ЛА, а также выдачи этих данных в прицельно-навигационный комплекс, в систему автоматического управления и на индикаторы.
Работа ДИСС основана на использовании эффекта Доплера. Сущность эффекта Доплера заключается в том, что при облучении земной поверхности с движущегося ЛА частота принятых на нем отраженных от земли радиоволн  отличается от частоты радиоволн, излученных передатчиком
отличается от частоты радиоволн, излученных передатчиком  . Абсолютная величина разности этих частот называется доплеровской частотой
. Абсолютная величина разности этих частот называется доплеровской частотой
 . (19.3)
. (19.3)

Принцип измерения путевой скорости:
 или, учитывая, что излучение под углом, то
или, учитывая, что излучение под углом, то 
Доплеровская частота зависит от радиальной скорости ЛА относительно Земли
 , (19.4)
, (19.4)
где  – радиальная скорость ЛА – скорость в направлении излучения радиоволны,
– радиальная скорость ЛА – скорость в направлении излучения радиоволны,  – длина радиоволны передатчика.
– длина радиоволны передатчика.
Антенная система доплеровского измерителя формирует диаграмму направленности в виде узких лучей, отклоненный в сторону Земли на горизонтальный  и вертикальный
и вертикальный  углы визирования в самолетной системе координат
углы визирования в самолетной системе координат  . Начало
. Начало  этой прямоугольной системы совпадает с центром масс самолета, ось
этой прямоугольной системы совпадает с центром масс самолета, ось  направлена вперед по продольной оси самолета, а ось
направлена вперед по продольной оси самолета, а ось  лежит в плоскости правого крыла (рис. 19.3). Здесь
лежит в плоскости правого крыла (рис. 19.3). Здесь  – угол между продольной осью самолета и проекцией луча на плоскость
– угол между продольной осью самолета и проекцией луча на плоскость  ;
;  – угол между лучом и плоскостью
– угол между лучом и плоскостью  ,
,  – угол между путевой скоростью и проекцией луча на горизонтальную плоскость.
– угол между путевой скоростью и проекцией луча на горизонтальную плоскость.

Рис. 19.3. Ориентация диаграммы направленности в связанной самолетной системе координат
Радиальная скорость  представляет собой проекцию путевой скорости на направление излучения. Следовательно, доплеровская частота по направлению вектора путевой скорости равна
представляет собой проекцию путевой скорости на направление излучения. Следовательно, доплеровская частота по направлению вектора путевой скорости равна
 . (19.5)
. (19.5)
Из данного соотношению следует, что при постоянных углах доплеровская частота является функцией двух переменных: путевой скорости и угла сноса.
Для определения двух неизвестных величин (  и
и  ) нужно иметь как минимум два уравнения, что при неподвижных антеннах может быть достигнуто применением двух лучей, имеющих разные (хотя бы один из установочных) углы, например,
) нужно иметь как минимум два уравнения, что при неподвижных антеннах может быть достигнуто применением двух лучей, имеющих разные (хотя бы один из установочных) углы, например,  и
и  . Тогда для двух лучей получим два значения доплеровской частоты и соответственно систему из двух уравнений с двумя неизвестными
. Тогда для двух лучей получим два значения доплеровской частоты и соответственно систему из двух уравнений с двумя неизвестными
 ,
,  . (19.6)
. (19.6)
Уравнения (19.6) справедливы лишь для горизонтального полета при отсутствии вертикальной  составляющей вектора. Для того, чтобы использовать формулы (18.6) при произвольных условиях полета и уменьшить появляющиеся при этом погрешности, в самолетных ДИСС применяют не двух-, а трех- или четырехлучевые антенные системы (для вертолетных ДИСС, где нужно определять не только путевую скорость
составляющей вектора. Для того, чтобы использовать формулы (18.6) при произвольных условиях полета и уменьшить появляющиеся при этом погрешности, в самолетных ДИСС применяют не двух-, а трех- или четырехлучевые антенные системы (для вертолетных ДИСС, где нужно определять не только путевую скорость  , но и вертикальную составляющую
, но и вертикальную составляющую  полной скорости, необходимо применение трех лучей).
полной скорости, необходимо применение трех лучей).
Измерение путевой скорости и угла сноса осуществляется сравнением доплеровских частот по парам лучей. При отсутствии сноса вектор путевой скорости совпадает с продольной осью ЛА, доплеровские частоты по обоим лучам одинаковы, и разность их равна нулю. При наличии сноса доплеровские частоты неодинаковы, так как вектор путевой скорости отклоняется от продольной оси ЛА на величину угла сноса.
Трехлучевая антенная система схематически изображена на рис. 19.4 в двух плоскостях: горизонтальной  и вертикальной
и вертикальной  , проходящей через лучи 1–3. Четырехлучевая система с обозначением углов
, проходящей через лучи 1–3. Четырехлучевая система с обозначением углов  ,
,  для горизонтального полета показана на рис. 18.5.
для горизонтального полета показана на рис. 18.5.

Рис. 19.4. Трехлучевая антенная система

Рис. 19.5. Четырехлучевая антенная система
Как показана на рис. 19.4 и 19.5, в антенных системах применено симметричное расположение лучей, при котором
 ;
;  ,
,  ,
,  ,
,
 . (19.7)
. (19.7)
Для трехлучевой системы в горизонтальном полете доплеровские частоты в каждом из лучей (каналов) определяются следующими выражениями
 ;
;
 ;
;
 .
.
 ,
,
 . (19.8)
. (19.8)
Отсюда находим алгоритмы вычислений навигационных параметров:
 ,
,  ,
,
 .
.
 . (19.9)
. (19.9)
В четырехлучевых системах навигационные параметры вычисляются по аналогичным формулам:
 ,
,  , (19.10)
, (19.10)
где  ,
,  .
.
Необходимость применения как минимум трех лучей и трех частот рассмотрим на примере влияния тангажа  . На рис. 19.6 сплошными линиями показаны направления лучей при
. На рис. 19.6 сплошными линиями показаны направления лучей при  , а пунктиром – при
, а пунктиром – при  . Тангаж приводит к уменьшению угла
. Тангаж приводит к уменьшению угла  в первом луче и увеличению угла
в первом луче и увеличению угла  во втором и третьем лучах. Таким образом, сумма и разность частот в (19.9) изменяются значительно меньше, чем каждая из частот в отдельности.
во втором и третьем лучах. Таким образом, сумма и разность частот в (19.9) изменяются значительно меньше, чем каждая из частот в отдельности.
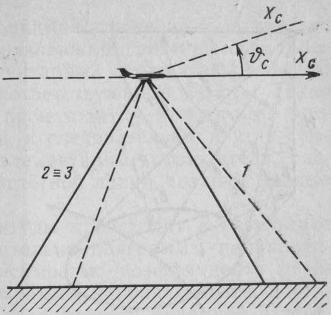
Рис. 19.6. Изменение направления лучей, связанного с тангажом
Обобщенная структурная схема ДИСС приведена на рис. 19.7. В комплект ДИСС входят передатчик, приемник, приемная и передающая антенны с коммутационными устройствами, частотомер, вычислительное устройство, индикатор и пульт управления.

Рис. 19.7. Структурная схема ДИСС
Высокочастотная энергия передатчика излучается направленно к поверхности Земли. Передающая и приемная антенны имеют остронаправленную (игольчатую) трех- или четырехлучевую диаграмму направленности. Излучение и прием энергии по парам лучей происходит поочередно. Очередность излучения и приема задается синхронизатором. В приемнике в результате сложения частот прямого  и отраженного
и отраженного  сигналов выделяется доплеровская частота каждой пары лучей. Выделенная и усиленная в приемнике доплеровская частота поступает в частотомер, который вырабатывает постоянные напряжения
сигналов выделяется доплеровская частота каждой пары лучей. Выделенная и усиленная в приемнике доплеровская частота поступает в частотомер, который вырабатывает постоянные напряжения  и
и  , пропорциональные доплеровским частотам каждой пары лучей приемной антенны. После усиления оба напряжения выдаются в вычислитель, который предназначен для вычисления путевой скорости и угла сноса. Из вычислителя сигналы, пропорциональные путевой скорости и углу сноса, выдаются на индикатор и потребителям.
, пропорциональные доплеровским частотам каждой пары лучей приемной антенны. После усиления оба напряжения выдаются в вычислитель, который предназначен для вычисления путевой скорости и угла сноса. Из вычислителя сигналы, пропорциональные путевой скорости и углу сноса, выдаются на индикатор и потребителям.
Для учета характера отражающей поверхности при полете над морем в вычислитель вводится поправка с помощью переключателя «Суша–Море» на пульте управления.
В ДИСС предусмотрены следующие режимы работы: «Работа», «Контроль», «Память». Включение необходимого режима осуществляется переключателем режимов работы.
Режим «Работа» предназначен для автоматического непрерывного измерения путевой скорости и угла сноса, выдачи их значений на индикатор и потребителям.
Режим «Контроль» предназначен для проверки исправности измерителя с помощью схемы встроенного контроля. При этом к схеме измерения доплеровских частот подключаются специальные генераторы контрольных частот, имитирующие доплеровские частоты. Сигналы генераторов контрольных частот подаются в частотомер вместо доплеровских частот, и на индикаторе отрабатываются контрольные значения путевой скорости и угла сноса.
Включение режима «Память» производится с пульта управления с выключением излучения или автоматически при отсутствии или низком уровне отраженных сигналов на входе приемника (например, при полете над спокойным морем), при неисправности приемного или передающего трактов и при углах крена или тангажа более 10±2°. При этом индицируются на индикаторе и выдаются потребителям запомненные на момент включения режима «Память» значения путевой скорости и угла сноса.