|
|
Принцип работы и структурная схема ГЛС
Функционирование ГЛС и принципы их построения основаны на использовании принципов и методов обработки гидроакустической информации.
При этом в ГЛС может быть реализована как аналоговая, так и цифровая обработка гидроакустических сигналов.
При аналоговой обработке гидроакустических сигналов может производиться временная селекция — выделение сигналов только в заданные промежутки времени, частотный (спектральный) анализ — выявление особенностей спектра в широкой или узкой полосе частот, а также выявление связи между спектрами сигналов, обработка сигналов с выявлением взаимосвязи между ними в различные моменты времени (корреляционный анализ) и статистический анализ, определяющий характер распределения амплитуд и фаз за определенный промежуток времени.
Рассмотрим функционирование ГЛС с аналоговой обработкой гидроакустических сигналов.
На рис. 1 представлена структурная схема ГЛС. В состав ГЛС обычно входят следующие устройства.

Рис. 1. Структурная схема ГЛС
Акустическая антенна (АА)предназначена для преобразования электрической энергии в акустическую и обратно.
Входные устройства служат для предварительного усиления принятых сигналов, а также для коммутации акустической антенны с генераторным и приемным устройствами.
Генераторное устройство формирует импульсы излучения с заданными параметрами.
Приемные каналы тракта обнаружениярешают задачи обнаружения подводных объектов и грубого определения их координат.
Каналы уточнения координат предназначены для точного определения координат подводных объектов с последующей выдачей их в системы управления оружием.
Системы полуавтоматического сопровождения целей позволяют осуществлять сопровождение целей в полуавтоматическом режиме с автоматическим съемом текущих координат.
Канал прослушивания дает возможность прослушивать принятые сигналы на слух для классификации гидроакустического контакта с целью.
Система индикации является выходным устройством и необходима для наглядного отображения полученной информации и съема данных о цели.
Система управления и синхронизации является связующим звеном между всеми устройствами и системами ГЛС.
Встроенное учебно-тренировочное устройство (ВУТУ) предназначено для отработки операторских навыков по имитируемой цели, а также умения по управлению ГЛС в различных режимах.
Встроенная система автоматического контроля (ВСАК)позволяет контролировать основные технические параметры ГЛС, выявлять ее неисправности.
ГЛС включаются в работу путем подачи питающих напряжений на все устройства, для этого в станции имеется распределительный щит, на который выведены органы управления системой электропитания.
Способы обзора водного пространства при помощи гидроакустических антенн показаны на рисунке ниже.

Процесс обнаружения подводных объектов с помощью ГЛС осуществляется за счет чередования циклов излучения и приема. При излучении акустической энергии в водной среде формируется акустическое поле.

Рис.2.
После завершения цикла излучения станция переключается в режим приема, при этом отраженные от объектов сигналы принимаются, обрабатываются и проявляются на выходных устройствах, что позволяет оператору зафиксировать наличие цели и в последующем определить координаты (дистанцию, пеленг, курсовой угол, угол места).

Рис. 3.
Определение дальности (дистанции до цели) является одним из наиболее важных измерений, выполняемых при гидролокации целей. Как известно, для определения дистанции наиболее широко применяется импульсный метод, основанный на использовании выражения
 ,
,
где с —скорость звука;
Д —дистанция;
t —временная задержка эхо-сигнала относительно момента излучения.
Скорость развертки на электронно-лучевой трубке индикатора пропорциональна скорости звука в воде.
Если в ГЛС используется индикатор со спиральной разверткой (рис. 4), то скорость звука пропорциональна (равна с/2) радиальной скорости, т. е. скорости развертки вдоль радиуса (показано стрелкой).

Рис. 4. Вид индикатора со спиральной разверткой
При использовании двух координатного индикатора со строчной разверткой (рис. 5) скорость звука пропорциональна скорости развертки по вертикали (показано стрелкой).

Рис. 5. Вид индикатора со строчной разверткой
Отсчет времени прохождения импульса излучения до объекта и отраженного сигнала обратно обеспечивается синхронизацией моментов начала излучения и начала развертки на экране индикатора.
Так как скорость развертки пропорциональна скорости распространения звука в водной среде, то положение отметки от цели на экране индикатора относительно начала развертки и определяет дистанцию до обнаруженного объекта.
Наглядно процесс измерения дистанции до цели показан на рис. 6.
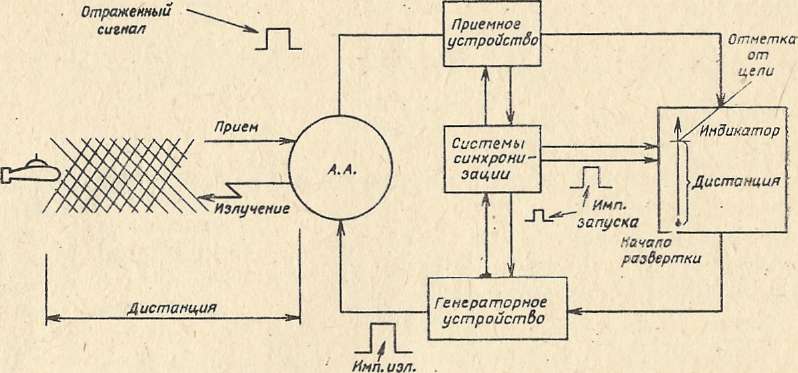
Рис. 6. Схема, отражающая принцип определения дистанции до цели
При пеленговании, т. е. определении направления на цель, в ГЛС реализуется пространственно-временная обработка сигнала, при этом в режимах обнаружения наиболее широко используется максимальный метод.
Максимальный метод в конкретных ГЛС может быть реализован различными способами. В частности, в ряде ГЛС применен многоканальный приемник с использованием статической веерной характеристики направленности. При этом: количество лепестков ХН равно числу каналов (рис. 7).
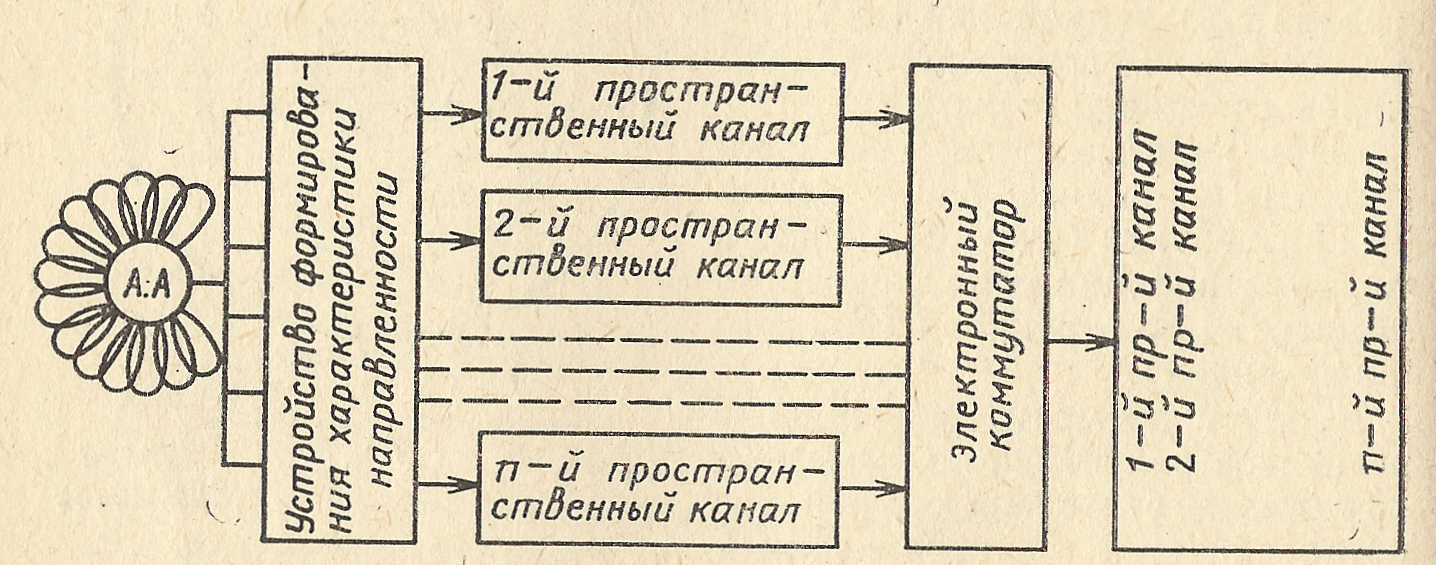
Рис. 7. Функциональная схема приемных каналов тракта обнаружения
Таким образом, в пеленговании участвуют п пространственных каналов, каждый из них ориентирован на строго определенное направление. Сигнал, принятый с направления (например, первого), получает максимальное усиление соответственно в первом пространственном канале; сигнал, принятый со второго направления, — во втором и т. д. Выходы пространственных каналов поочередно с помощью электронного коммутатора подключаются к индикатору.
При использовании индикатора кругового обзора со спиральной разверткой начало и скорость обхода электронным коммутатором выходов пространственных каналов синхронизированы с началом и круговой скоростью развертки индикатора. В результате местоположение отметки от цели на экране индикатора соответствует номеру канала и направлению на цель (рис. 8).

Рис. 6.8. Вид отметки от цели на экране индикатора со спиральной разверткой
При применении двух координатного индикатора со строчной разверткой начало и скорость обхода электронным коммутатором выходов пространственных каналов синхронизированы с началом и скоростью горизонтальной развертки.
Поэтому, так же как и в первом случае, местоположение отметки от цели на экране индикатора соответствует номеру пространственного канала, т. е. направлению на цель (рис. 9).

Рис. 9. Вид отметок от целей на индикаторе со строчной разверткой
Съем данных координат цели осуществляется либо системой механических визиров, либо с помощью электронного визира.
В первом случае оператор, пользуясь штурвалами «дистанция» и «пеленг», перемещает шкалы визиров по вертикали и горизонтали, подводит их под отметку от цели (рис. 10) и по шкале снимает данные.
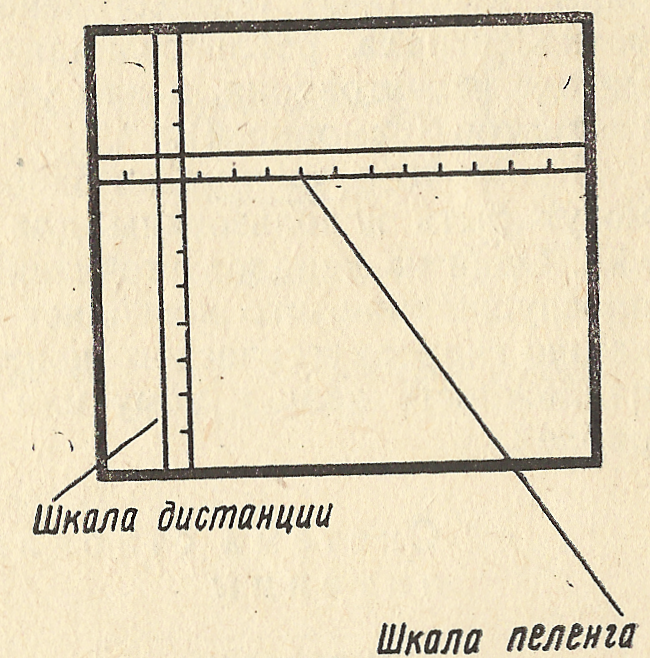
Рис. 10. Вид индикатора со шкалами пеленга и дистанции
При наличии электронного съема оператор органами управления («дистанция» и «пеленг») совмещает метку электронного съема с отметкой от цели и по шкалам снимает данные.
Тракт обнаружения, как уже указывалось, позволяет определять координаты целей с точностью в пределах 3—5° по пеленгу и 3—5% от дистанции.
Для более точного определения координат цели в ГЛС используются для уточнения пеленга специальные каналы, в которых осуществлена пространственно-временная обработка сигнала, реализованная на фазовом или фазоамплитудном методе пеленгования, а для уточнения дистанции применяется регистратор (самописец).
Кроме того, данные по одной из целей в случае необходимости могут быть использованы для полуавтоматического сопровождения. Один из каналов уточнения координат имеет выход на канал прослушивания, что позволяет оператору осуществлять классификацию гидроакустического контакта с целью, т. е. определять принадлежность цели к тому или иному виду и классу судов и кораблей.