|
|
Цель лабораторного занятия
Изучение системы управления по перемещению линейного объекта из заданной начальной точки Х(0) = Х0 в пространстве состояний в заданную конечную точку Х(Т) = ХТ за минимальное время.
Задание на работу
- Выполнить синтез оптимальной по быстродействию системы с помощью принципа максимума Понтрягина (см. приложение №3).
- Разработать модель для данного типа ОСАУ.
- Провести исследование ОСАУ с применением программного продукта "20-sim Pro 2.3".
- Снять переходные и импульсные характеристики.
Выполнение работы:
1.Представим объект  в виде уравнения состояния (нормальная форма)
в виде уравнения состояния (нормальная форма)


В рассматриваемом примере матрица  , вектор
, вектор  . Образуем матрицу
. Образуем матрицу 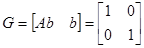 .
.
Матрица G – невыраженная, поэтому система удовлетворяет условиям теоремы об n-интервалах.
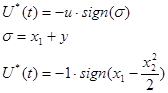
1.1 Определяем конечную точку:


1.2 Уравнение линий переключения (  ):
):


2. Разработка модели для данного типа ОСАУ. На рис. 1 представлена структурная схема системы, реализующий данный закон управления:
 рис. 1
рис. 1
По алгоритму решения, составим структурную схему системы, реализующей полученный закон управления в программе «20-sim».
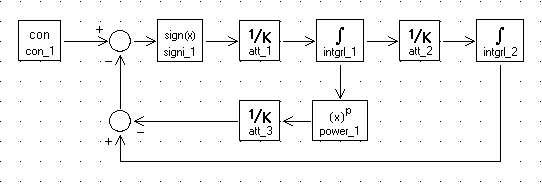
Рис. 1-1. Структурная схема модели ОСАУ с объектом регулирования 

3. Вызовем окно проведения эксперимента, нажавSimulation. Подготовим эксперимент. Все параметры объекта вводим по заданию.
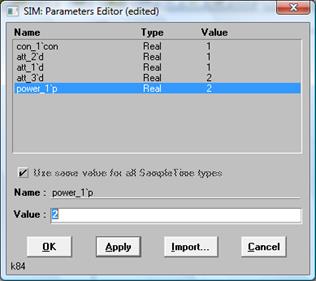
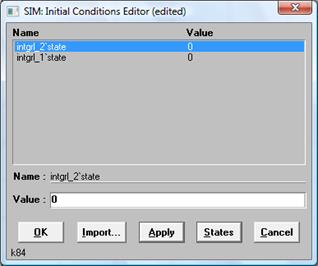


Рис 2 – параметры эксперимента
4.Результат эксперимента:
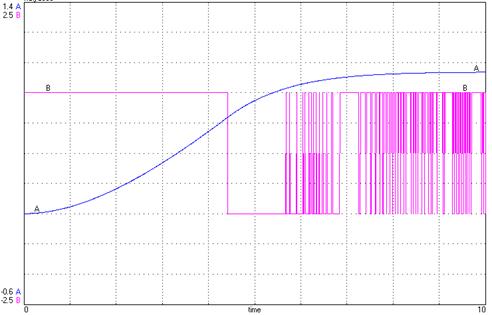
Рис. 3 – переходная характеристика
Tp=8,7 с.
5. структурная схема для снятия импульсной характеристики:

Рис. 4 – структурная модель с единичным импульсом
6.Вызовем окно проведения эксперимента, нажавSimulation. Подготовим эксперимент. Все параметры объекта вводим по заданию.
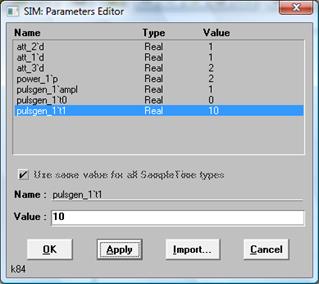
Рис. 5 – параметры эксперимента
- Результат эксперимента:
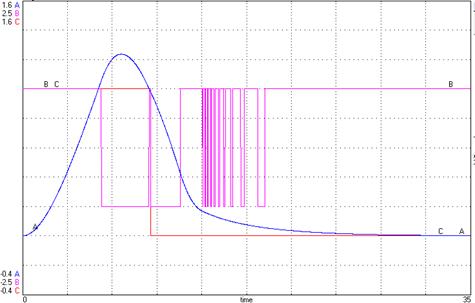
Рис. 6 – результат эксперимента
Tp=30,8 с.
8. Отчет о проделанной работе должен содержать:
· Задание на работу
· Ход выполнения работы
· Полученные результаты работы.
· Выводы о проделанной работе
Лабораторная работа №5
"Сравнительный анализ системы с ПИД-регулятором и синтеза с помощью принципа Понтрягина"