|
|
История появления термина
Рис. 39. Декарт (Descartes) Рене (латинизированное — Картезий; Cartesius) (1596-1650), французский философ, математик, физик и физиолог, и философ, создатель знаменитого метода координат.
Ещё в первой половине XVII века понятие импульса введено Рене Декартом (рис.39). Так как физическое понятие массы в то время отсутствовало, он определил импульс как произведение «величины тела на скорость его движения». Позже такое определение было уточнено Исааком Ньютоном. Согласно Ньютону, «количество движения есть мера такового, устанавливаемая пропорционально скорости и массе».
Закон сохранения импульса
В инерциальной системе отсчёта импульс замкнутой системы частиц остаётся постоянным:  const.
const.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
Из определения закона сохранения импульса следует, что он строго выполняется лишь в идеальном случае.
Как и любой из фундаментальных законов сохранения, закон сохранения импульса связан, согласно теореме Нётер, с одной из фундаментальных симметрий, — однородность пространства[10].
Законы Ньютона
Законы Ньютона – основные законы динамики. Они не выводятся ни из каких более общих теоретических положений, а являются обобщением большого числа опытных фактов. В классической механике эти законы играют такую же роль, как и известные постулаты в геометрии Евклида. . Впервые в полной мере сформулированы Исааком Ньютоном в книге «Математические начала натуральной философии» (1687 год).
Законы Ньютона строго выполняются лишь в инерциальных системах отсчёта.
Сам Ньютон в качестве такой системы отсчёта выбрал систему отсчёта, связанную с т. н. «абсолютным пространством»[11]. Современная физика отказалась от концепции абсолютного пространства и времени классической физики Ньютона. Релятивистская теория продемонстрировала, что пространство и время относительны.
Первый закон Ньютона
Первый закон Ньютона постулирует существование инерциальных систем отсчета. Поэтому он также известен как закон инерции.
В современной физике первый закон Ньютона принято формулировать в следующем виде:
Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальные точки, когда на них не действуют никакие силы (или действуют силы взаимно уравновешенные), находятся в состоянии покоя или равномерного прямолинейного движения.
Или аналогичная формулировка:
В отсутствие внешних воздействий (сил) или когда действующие силы взаимно уравновешены, материальная точка сохраняет неизменным состояние своего движения или покоя относительно инерциальной системы отсчёта.
Такое движение называется движением по инерции.
Системы отсчёта, в которых выполняется закон инерции, называют инерциальными системами отсчёта. Все другие системы отсчёта (например, вращающиеся или движущиеся с ускорением) называются соответственно неинерциальными. Проявлением неинерциальности в них является возникновении фиктивных сил, называемых «силами инерции».
Второй закон Ньютона
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этого ускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта.
Масса материальной точки при этом полагается величиной постоянной во времени и независящей от каких-либо особенностей её движения и взаимодействия с другими телами.
В современной формулировке второй закон Ньютона утверждает:
В инерциальной системе отсчета (ИСО) ускорение, которое получает материальная точка, прямо пропорционально приложенной к ней силе и обратно пропорционально её массе (рис.40; 41):
 =
=  ,
,
где  — ускорение материальной точки;
— ускорение материальной точки;  — сила, приложенная к материальной точке;
— сила, приложенная к материальной точке;  — масса материальной точки .
— масса материальной точки .
 .
.
Рис. 40.
Рис.41.
В случае, когда масса материальной точки меняется со временем, второй закон Ньютона формулируется с использованием понятия импульс:
В инерциальной системе отсчета скорость изменения импульса материальной точки равна действующей на неё силе:
 =
= 
где  — импульс точки,
— импульс точки, 
 –производная импульса по времени, скорость изменения импульса.
–производная импульса по времени, скорость изменения импульса.
Действительно,  =
=  =
=  = m
= m  = m
= m 
Однако, вместе с таким расширительным толкованием уравнения приходится существенным образом модифицировать принятые ранее определения и изменять смысл таких фундаментальных понятий, как материальная точка, импульс и сила.
Замечания:
1. Когда на материальную точку действуют несколько сил, с учётом принципа суперпозиции, второй закон Ньютона записывается в виде: m  =
= 
или, =  .
.
2. Второй закон Ньютона, как и вся классическая механика, действителен только для движения тел со скоростями, много меньшими скорости света. При движении тел со скоростями, близкими к скорости света (  , используется релятивистское обобщение второго закона, получаемое в рамках специальной теории относительности.
, используется релятивистское обобщение второго закона, получаемое в рамках специальной теории относительности.
3. Следует учитывать, что нельзя рассматривать частный случай (при  ) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
Третий закон Ньютона
Механическое воздействие тел друг на друга носит характер взаимодействия. Об этом утверждает третий закон Ньютона:
Две материальные точки действуют друг на друга с силами, которые численно равны и направлены в противоположные стороны вдоль прямой, соединяющей эти точки (рис. 42):  1 = 2.
1 = 2.

Рис. 42.
Одна из этих сил называется действующей, а другая -–противодействующей. Силы, возникающие при взаимодействии тел, всегда имеют одинаковую природу. Они приложены к разным телам и поэтому не могут уравновешивать друг друга. Складывать по правилам векторного сложения можно только силы, приложенные к одному телу.
Пример.
1). В электростатике взаимодействие электрических зарядов подчиняется третьему закону Ньютона (рис. 43):

Рис. 43.
2). Для силы Лоренца третий закон Ньютона не выполняется.
Энергия
При движении механической системы меняются координаты и скорости входящих в неё тел. Однако существуют характеризующие систему величины, которые с течением времени остаются постоянными. Такими величинами являются в механике энергия, импульс и момент импульса.
Эне́ргия (Е, W) — скалярная физическая величина, являющаяся единой мерой различных форм движения и взаимодействия материи, мерой перехода движения материи из одних форм в другие.
В СИ: [E, W] = Дж.
Термин «энергия» происходит от слова energeia, которое впервые появилось в работах Аристотеля (др.-греч. ἐνέργεια — «действие, деятельность, сила, мощь»). В 1807 году Томас Юнг первым использовал термин «энергия» в современном смысле этого слова взамен понятия живая сила.
Энергия системы является функцией состояния, а не процесса: она не зависит от того, каким образом достигнуто данное состояние.
С фундаментальной точки зрения энергия представляет собой интеграл движения (то есть сохраняющуюся при движении величину), связанный, согласно теореме Нётер, с однородностью времени. Таким образом, введение понятия энергии как физической величины целесообразно только в том случае, если рассматриваемая физическая система однородна во времени.
В соответствии с различными формами движения материи выделяют различные виды энергии: механическую, внутреннюю, электромагнитную, химическую, ядерную и др.
Механика различает потенциальную энергию (или, в более общем случае, энергию взаимодействия тел или их частей между собой или с внешними полями) и кинетическую энергию (энергия движения). Их сумма называется полной механической энергией.
Энергией обладают все виды полей. По этому признаку различают: электромагнитную (разделяемую иногда на электрическую и магнитную энергии), гравитационную и ядерную энергии (также может быть подразделяться на энергию слабого и сильного взаимодействий).
Термодинамика рассматривает внутреннюю энергию и иные термодинамические потенциалы.
В химии рассматриваются такие величины, как энергия связи и энтальпия, имеющие размерность энергии, отнесённой к количеству вещества.
В механике рассматривается только механическая энергия.
Механическая энергия является мерой движения и взаимодействия механических объектов (материальных точек, твёрдых тел).
Согласно специальной теории относительности между массой и энергией существует связь, выражаемая знаменитой формулой Эйнштейна
E = mc2 ,
где E — энергия системы, m — её масса, c — скорость света в вакууме.
Работа силы
Для количественного описания процесса обмена энергией между взаимодействующими телами в механике используется понятие работы силы, приложенной к рассматриваемому телу. Работа силы – это энергетическая характеристика движения.
Понятие работы в физике отличается от её обыденного, физиологического понимания как всякого усилия, мускульного напряжения.
Пусть материальная частица М под действием переменной силы перемещается по криволинейной траектории из точки S1 в точку S2 (рис. 44). Выделим элементарный участок пути dS, на котором силу можно считать постоянной, а перемещение прямолинейным.
 Рис. 44.
Рис. 44.
Уравнение второго закона Ньютона для частицы М в этом случае имеет вид: d  = •dt. Умножив скалярно обе части этого равенства на скорость частицы
= •dt. Умножив скалярно обе части этого равенства на скорость частицы  , получим:
, получим:  d = • •dt, где • dt = d
d = • •dt, где • dt = d  . В данном случае d – вектор перемещения. Тогда можно записать:
. В данном случае d – вектор перемещения. Тогда можно записать:  А = • d = •d , где А[12] – элементарная работа силы не перемещении d .
А = • d = •d , где А[12] – элементарная работа силы не перемещении d .
Элементарной работой  А силы на перемещении d
А силы на перемещении d  называется скалярное произведение
называется скалярное произведение  А=
А=  • d
• d  = F• cos
= F• cos  •dS =
•dS = 
Работа на пути конечной длины (S1S2) выражается через криволинейный интеграл: А =  =
= 
Механическая работа — это скалярная физическая величина, являющаяся количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек), тела или системы.
Если рассматриваемая сила постоянна ( = соnst), а тело, к которому она приложена, движется поступательно и прямолинейно, то работой, совершаемой силой  при прохождении телом пути S, называют величину
при прохождении телом пути S, называют величину
А =  , ,
|
где а -– угол между силой  и направлением движения тела (рис. 45).
и направлением движения тела (рис. 45).
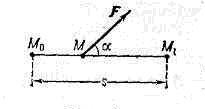
Рис. 45.
Т.е. работа (этой силы) равна произведению величины проекции вектора силы  на направление движения и величины совершённого перемещения S.
на направление движения и величины совершённого перемещения S.
Работа величина алгебраическая:
А > 0 при > 0 – движущая сила; A < 0 при < 0 – тормозящая сила.
Если на тело одновременно действуют несколько сил, то работа, совершаемая ими, равна сумме работ каждой из сил порознь: А = ∑Аi .
Работа не совершается в следующих случаях:
1. = 0, т.е. на тело сила не действует (например, движение по инерции);
2.  = 0, т.е. тело покоится;
= 0, т.е. тело покоится;
3.  =
=  , т.е. вектор силы перпендикулярен к направлению вектора перемещения (
, т.е. вектор силы перпендикулярен к направлению вектора перемещения (  ).
).
Графически работа определяется по площади криволинейной фигуры под графиком Fs(x) (рис. 46).
Рис. 46.
Мощность
Мощность – скалярная физическая величина, численно равная работе, совершаемой за единицу времени:
N =  =
=  =
=  , (Вт).
, (Вт).
Кинетическая энергия
Кинетическая энергия – энергия движущегося тела.
Обозначается: Ек,; Wк; Т; К (Дж).
Пусть частица массой m движется под действием силы  Уравнение второго закона Ньютона для частицы М в этом случае имеет вид: d = •dt . Умножив скалярно обе части этого равенства на скорость частицы , получим:
Уравнение второго закона Ньютона для частицы М в этом случае имеет вид: d = •dt . Умножив скалярно обе части этого равенства на скорость частицы , получим:  d = • dt = m •d
d = • dt = m •d  Учтем, что •d
Учтем, что •d  •d
•d  . Тогда: m •d = m •d
. Тогда: m •d = m •d  или m •d = d(
или m •d = d(  ), где К= - кинетическая энергия тела.
), где К= - кинетическая энергия тела.
Тогда кинетическая энергия тела выражается по формуле:
К =  =
= 
где Р - импульс тела.
Кинетическая энергия – величина относительная, всегда выполняется условие: К  0.
0.
Т.к. d( ) = dK, а d = • •dt =  =
=  Тогда dK =
Тогда dK =  при конечном перемещении из точки 1 в точку 2: ∆К = А12.
при конечном перемещении из точки 1 в точку 2: ∆К = А12.
Тогда в общем случае можно утверждать:
изменение кинетической энергии механической системы равно алгебраической сумме работ всех внешних и внутренних сил, действующих на эту систему: dK = Авнешн. + Авнутр.
Силовое поле
Материя существует в виде вещества и поля. Поле – переносчик взаимодействий между телами (гравитационное, электромагнитное поле, поле ядерных сил и т.п.).
В механике силовое поле – часть пространства, в каждой точке которой на помещенную туда материальную частицу действует сила, зависящая от координат частицы.
Силовое поле называется стационарным, если оно не изменяется со временем.
Потенциальное силовое поле
Стационарное силовое поле, в котором работа сил поля, действующих на материальную частицу, зависит только от начального и конечного положения частицы и не зависит от вида её траектории, называется потенциальным. Силы такого поля называются консервативными.
Если это условие не выполняется, то силовое поле не будет потенциальным ( в частности, вихревым, как магнитное поле).
Потенциальными полями являются: гравитационное, электростатическое, поля центральных сил.
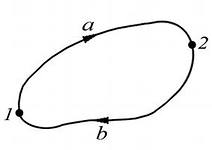
Терема: в потенциальном поле работа сил поля на любом замкнутом пути L равна нулю (рис. 47).
L
Рис. 47.
Доказательство
Т.к. поле потенциальное, то А1а2 = А1b2, но
А1b2= - А2b1. Тогда: А1а2 + А2b1= А1а2  A1b2= 0.
A1b2= 0.
Обратная теорема: если работа сил поля на любом замкнутом пути L равна нулю, то поле потенциальное.
Доказательство
По условию: А1а2 + А2b1 = 0, тогда: А1а2 = - А2b1, но
А2b1 = - А1b2, то А1а2 = А1b2.
Работа сил потенциального поля на произвольном замкнутом пути L выражается через криволинейный интеграл:
А11 = 
 0,
0,
где 
 0 – циркуляция вектора вдоль замкнутой кривой L.
0 – циркуляция вектора вдоль замкнутой кривой L.
Условие: 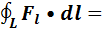 0 является необходимым и достаточным условием потенциальности поля.
0 является необходимым и достаточным условием потенциальности поля.
Потенциальная энергия
Для частицы, находящейся в потенциальном поле, можно ввести понятие потенциальной энергии.
Потенциальная энергия – часть механической энергии системы, зависящая от взаимного расположения материальных точек, составляющих эту систему, и от их положения во внешнем силовом поле.
Обозначается: Еп,; Wп; U; V;П (Дж).
Т.е. потенциальная энергия есть функция координат частицы в поле: П = П (x, y, z) или П = П(  ).
).
Пусть материальная частица перемещается в потенциальном поле сил из разных i –ых точек в фиксированную точку 0 (рис. 48). Т.к. поле потенциальное, то работа сил поля при фиксированной точке 0 зависит только от положения i – той точки. Найдём работу сил поля при перемещении частицы из точки 1 в точку 2. Т.к. работа не зависит от пути, выберем путь, проходящий через точку 0. Тогда работа на пути 100′ может быть представлена в виде: A10′ = A10 + A00′ = A10  A00′ . Или с учётом того, что П = П(
A00′ . Или с учётом того, что П = П(  ), получаем: A10′ = П1 П2, где П1 П2 = - ∆П – убыль потенциальной энергии.
), получаем: A10′ = П1 П2, где П1 П2 = - ∆П – убыль потенциальной энергии.
В случае элементарной работы:  = dП, т.е. работа сил потенциального поля (консервативных сил) равна убыли потенциальной энергии частицы в данном поле.
= dП, т.е. работа сил потенциального поля (консервативных сил) равна убыли потенциальной энергии частицы в данном поле.
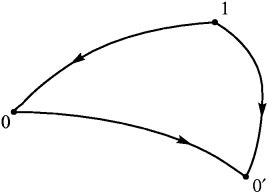
Рис. 48.
Частице, находящейся в точке 0 поля, можно приписать любое наперёд выбранное значение потенциальной энергии. Математически это выражается в том, что потенциальная энергия П – это функция, которая определяется с точностью до некоторой произвольной постоянной. Однако это обстоятельство несущественно, т.к. во все формулы входит только разность значений потенциальных энергий в двух положениях частицы. Поэтому произвольная постоянная, одинаковая для всех точек поля, выпадает. Это соответствует тому обстоятельству, что путём измерения работы может быть определена лишь разность потенциальных энергий в двух точках поля, но не её абсолютное значение.
Т.о. потенциальная энергия – величина относительная, т.е. потенциальная энергия может быть как положительной, так и отрицательной или равной нулю величиной.
В отличие от кинетической энергии, где имеется каноническая формула для расчёта, в случае потенциальной энергии, т.к. она зависит от конфигурации системы и её положения во внешнем силовом поле, такой единой формулы нет.
Пример.
1. Потенциальная энергия упругой деформации
Примером силы, модуль которой зависит от координаты, может служить сила упругости пружины, подчиняющаяся закону Гука. Для того, чтобы растянуть пружину, к ней нужно приложить внешнюю силу  модуль которой пропорционален удлинению пружины x (рис. 49).
модуль которой пропорционален удлинению пружины x (рис. 49).

|
Рис.49. Растянутая пружина. Направление внешней силы  совпадает с направлением перемещения совпадает с направлением перемещения  FS = kx, где k – жесткость пружины. FS = kx, где k – жесткость пружины.  упр.= упр.= 
|
Зависимость модуля внешней силы от координаты x изображается на графике прямой линией (рис.50).
|
| Рис. 50. Зависимость модуля внешней силы от координаты при растяжении пружины. |
По площади треугольника на рис. 50 можно определить работу, совершенную внешней силой, приложенной к правому свободному концу пружины: А =  , где x – абсолютное удлинение пружины.
, где x – абсолютное удлинение пружины.
Этой же формулой выражается работа, совершенная внешней силой при сжатии пружины. В обоих случаях работа упругой силы упр равна по модулю работе внешней силы и противоположна ей по знаку.
Эта работа численно равна потенциальной энергии упругой деформации:
П =  .
.
2. Потенциальная энергия тела, поднятого над поверхностью Земли
Сила тяжести равна = m  и направлена по вертикали вниз. Вблизи поверхности Земли ее можно считать постоянной. При движении тела по вертикали вниз сила тяжести совпадает по направлению с перемещением. При переходе с высоты h1 над каким-то уровнем, от которого мы начинаем отсчет высоты, до высоты h2 над тем же уровнем (рис. 53), тело совершает перемещение, по абсолютной величине равное h1 – h2.
и направлена по вертикали вниз. Вблизи поверхности Земли ее можно считать постоянной. При движении тела по вертикали вниз сила тяжести совпадает по направлению с перемещением. При переходе с высоты h1 над каким-то уровнем, от которого мы начинаем отсчет высоты, до высоты h2 над тем же уровнем (рис. 53), тело совершает перемещение, по абсолютной величине равное h1 – h2.
Так как направления перемещения и силы совпадают, то работа силы тяжести положительна и равна: A = mg(h1 – h2).
Высоты h1 и h2 не обязательно отсчитывать от поверхности Земли. Для начала отсчета высот можно выбрать любой уровень. Это может быть пол комнаты, стол или стул, это может быть и дно ямы, вырытой в земле, и т. д. Ведь в формулу для работы входит разность высот, а она не зависит от того, откуда начинать их отсчет. Мы могли бы, например, условиться начинать отсчет высоты с уровня В (рис. 51).

Рис. 51.
Тогда высота этого уровня была бы равна нулю, а работа выражалась бы равенством: A = mgh, где h — высота точки A над уровнем В.
Если тело движется вертикально вверх, то сила тяжести направлена против движения тела и ее работа отрицательна.
Если после подъема вверх тело возвращается в исходную течку, то работа на таком пути, начинающемся и кончающемся в одной и той же точке (на замкнутом пути), на пути «туда и обратно», равна нулю. Это одна из особенностей силы тяжести: работа силы тяжести на замкнутом пути равна нулю.
Теперь выясним, какую работу совершает сила тяжести в случае, когда тело движется не по вертикали. В качестве примера рассмотрим движение тела по наклонной плоскости (рис. 52).

Рис. 52.
Допустим, что тело массой m по наклонной плоскости высотой h совершает перемещение S, по абсолютной величине равное длине наклонной плоскости. Работу силы тяжести mg в этом случае надо вычислять по формуле: A = mg  .
.
Но из рисунка видно, что  =
=  . Поэтому: A = mgS
. Поэтому: A = mgS  .
.
Мы получили для работы то же самое значение. Выходит, что работа силы тяжести не зависит от того, движется ли тело по вертикали или проходит более длинный путь по наклонной плоскости. При одной и той же «потере высоты» работа силы тяжести одинакова (рис. 53).
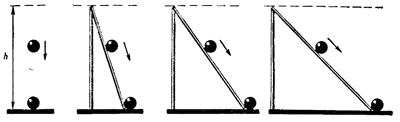
Рис. 53.
Это справедливо не только при движении по наклонной плоскости, но и по любому другому пути. В самом деле, допустим, что тело движется по какому-то произвольному пути, например по такому, какой изображен на рисунке 54.

Рис. 54.
Весь этот путь мы можем мысленно разбить на ряд малых участков: AA1, A2A1, A2A3 и т. д. Каждый из них может считаться маленькой наклонной плоскостью, а все движение тела на пути АВ можно представить как движение по множеству наклонных плоскостей, переходящих одна в другую. Работа силы тяжести на каждой такой наклонной плоскости равна произведению mg на изменение высоты тела на ней. Если изменения высот на отдельных участках равны h1, h2, h3 и т. д., то работы силы тяжести на них равны mgh1, mgh2, mgh3 и т. д. Тогда полную работу на всем пути можно найти, сложив все эти работы: A = mgh1 +mgh2 + … = mg(h1 + h2 + …).
Ho, h1 + h2 + … = h. Следовательно, A = mgh.
Таким образом, работа силы тяжести не зависит от траектории движения тела и всегда равна произведению силы тяжести на разность высот в исходном и конечном положениях. При движении вниз работа положительна, при движении вверх — отрицательна.
Эта работа численно равна потенциальной энергии тела над поверхностью земли:
П = mgh.
Почему же в технике и быту при подъеме грузов часто пользуются наклонной плоскостью? Ведь работа перемещения груза по наклонной плоскости такая же, как и при движении по вертикали! Это объясняется тем, что при равномерном движении груза по наклонной плоскости сила, которая должна быть приложена к грузу в направлении перемещения, меньше силы тяжести. Правда, груз при этом проходит больший путь. Больший путь — это плата за то, что по наклонной плоскости груз можно поднимать с помощью меньшей силы.
Связь между потенциальной энергией и силой поля
Т.к. выполняются соотношения:  •d •d  = =  или или  •d = •d =  •dS = •dS =  
 ,
где dП – убыль потенциальной энергии в направлении перемещения d ,
где dП – убыль потенциальной энергии в направлении перемещения d  .
Последняя формула устанавливает связь между потенциальной энергией и силой поля.
Взаимодействие тел можно описать либо с помощью сил, либо с помощью потенциальной энергии. В классической механике широко используются оба способа. Однако первый способ обладает большей общностью, т.к. он применим и к диссипативным силам, для которых нельзя ввести потенциальную энергию. В квантовой механике, описывающей явления микромира, диссипативных сил нет. В уравнения квантовой механики входит лишь потенциальная энергия взаимодействующих микрочастиц.
Величины, количественно описывающие силовое поле
Количественными характеристиками силового поля являются напряжённость и потенциал поля.
а). Напряжённость поля
Силовой характеристикой поля является напряжённость поля.
Опыт показывает, что в случае гравитационных и электростатических взаимодействий сила .
Последняя формула устанавливает связь между потенциальной энергией и силой поля.
Взаимодействие тел можно описать либо с помощью сил, либо с помощью потенциальной энергии. В классической механике широко используются оба способа. Однако первый способ обладает большей общностью, т.к. он применим и к диссипативным силам, для которых нельзя ввести потенциальную энергию. В квантовой механике, описывающей явления микромира, диссипативных сил нет. В уравнения квантовой механики входит лишь потенциальная энергия взаимодействующих микрочастиц.
Величины, количественно описывающие силовое поле
Количественными характеристиками силового поля являются напряжённость и потенциал поля.
а). Напряжённость поля
Силовой характеристикой поля является напряжённость поля.
Опыт показывает, что в случае гравитационных и электростатических взаимодействий сила  , действующая на частицу, помещённую в некоторую точку соответствующего поля, пропорциональна массе m (в случае гравитационного поля) или электрическому заряду q (в случае электростатического поля) частицы. В этом случае говорят о массе как «гравитационном заряде».
Напряжённостью силового поля называется векторная величина, равная отношению силы, действующей со стороны на помещенную в него материальную частицу, к величине массы (в случае гравитационного поля) или электрического заряда (в случае электростатического поля) этой частицы: , действующая на частицу, помещённую в некоторую точку соответствующего поля, пропорциональна массе m (в случае гравитационного поля) или электрическому заряду q (в случае электростатического поля) частицы. В этом случае говорят о массе как «гравитационном заряде».
Напряжённостью силового поля называется векторная величина, равная отношению силы, действующей со стороны на помещенную в него материальную частицу, к величине массы (в случае гравитационного поля) или электрического заряда (в случае электростатического поля) этой частицы:
 = =  – в случае гравитационного поля; – в случае гравитационного поля;
 = =  – в случае электростатического поля.
Направление векторов напряжённости ( – в случае электростатического поля.
Направление векторов напряжённости (  ) совпадает по направлению с вектором силы . Величинs массы m и заряда q должны быть так малы (m ) совпадает по направлению с вектором силы . Величинs массы m и заряда q должны быть так малы (m  ; q ; q  чтобы поле не искажалось.
Пример.
Гравитационное поле (поле тяготения), один из видов поля физического,посредством которого осуществляется гравитационное взаимодействие (притяжение) тел, например Солнца и планет Солнечной системы, планет и их спутников, Земли и находящихся на ней или вблизи нее тел.
Представим закон всемирного тяготения для двух материальных частиц (рис. 55): чтобы поле не искажалось.
Пример.
Гравитационное поле (поле тяготения), один из видов поля физического,посредством которого осуществляется гравитационное взаимодействие (притяжение) тел, например Солнца и планет Солнечной системы, планет и их спутников, Земли и находящихся на ней или вблизи нее тел.
Представим закон всемирного тяготения для двух материальных частиц (рис. 55):
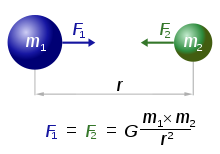 Рис. 55.
1= 2 =
Рис. 55.
1= 2 =   где 1 и 2 – силы притяжения соответствующих частиц 1 и 2; m1 и m2 – массы частиц;
где 1 и 2 – силы притяжения соответствующих частиц 1 и 2; m1 и m2 – массы частиц;  -–гравитационная постоянная.
Если обозначить массу частицы, создающей поле М, массу «пробной» частицы, вносимой в поле m (m -–гравитационная постоянная.
Если обозначить массу частицы, создающей поле М, массу «пробной» частицы, вносимой в поле m (m  а расстояние между частицами r, то силу притяжения можно записать в виде: = а расстояние между частицами r, то силу притяжения можно записать в виде: =  Из последней формулы следует, что напряжённость гравитационного поля, создаваемого частицей массой M, равна:
Из последней формулы следует, что напряжённость гравитационного поля, создаваемого частицей массой M, равна:
 = = = =  Единица измерения в СИ: [
Единица измерения в СИ: [  = =  .Т.е. размерность совпадает с размерностью ускорения. Напряжённость поля тяготения вблизи поверхности Земли равна ускорению свободного падения .Т.е. размерность совпадает с размерностью ускорения. Напряжённость поля тяготения вблизи поверхности Земли равна ускорению свободного падения  (c точностью до поправки, обусловленной вращением Земли).
б). Потенциал поля
Для потенциальных силовых полей можно ввести их энергетическую характеристику – потенциал.
В широком понимании потенциал[14] - это характеристика векторных полей, к которым относятся многие силовые поля, в т.ч. гравитационное и электромагнитное.
В более узком смысле:
Потенциал – это скалярная энергетическая характеристика потенциального силового поля, равная отношению потенциальной энергии взаимодействия частицы с полем к массе m этой частицы (в случае гравитационного поля), либо к величине заряда ϥ частицы (в случае электростатического поля): (c точностью до поправки, обусловленной вращением Земли).
б). Потенциал поля
Для потенциальных силовых полей можно ввести их энергетическую характеристику – потенциал.
В широком понимании потенциал[14] - это характеристика векторных полей, к которым относятся многие силовые поля, в т.ч. гравитационное и электромагнитное.
В более узком смысле:
Потенциал – это скалярная энергетическая характеристика потенциального силового поля, равная отношению потенциальной энергии взаимодействия частицы с полем к массе m этой частицы (в случае гравитационного поля), либо к величине заряда ϥ частицы (в случае электростатического поля):
 , ( , (  ) – для гравитационного поля; ) – для гравитационного поля;
 , (В) – для электростатического поля.
Пример.
Докажем, что гравитационное поле потенциально.
Пусть частица массой m движется в гравитационном поле частицы массой М из точки 1 в точку 2 поля по произвольной траектории. Работа сил поля:
А12 = , (В) – для электростатического поля.
Пример.
Докажем, что гравитационное поле потенциально.
Пусть частица массой m движется в гравитационном поле частицы массой М из точки 1 в точку 2 поля по произвольной траектории. Работа сил поля:
А12 =  где = где =   Тогда А12 = Тогда А12 = 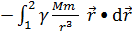 =
= =
=  Mm( Mm(   ), т.е. работа сил гравитационного поля не зависит от формы траектории материальной частицы, а определяется положением её начальной и конечной точек перемещения.
Тогда потенциал гравитационного поля: ), т.е. работа сил гравитационного поля не зависит от формы траектории материальной частицы, а определяется положением её начальной и конечной точек перемещения.
Тогда потенциал гравитационного поля:  = | = |  .
Принцип суперпозиции полей
При наличии нескольких (n) потенциальных полей их напряжённости в каждой точке пространства складываются геометрически, а их потенциалы – алгебраически:
= .
Принцип суперпозиции полей
При наличии нескольких (n) потенциальных полей их напряжённости в каждой точке пространства складываются геометрически, а их потенциалы – алгебраически:
=    Связь вектора напряжённости силового поля и разности потенциалов. Понятие о градиенте скалярной функции координат
Т.к. элементарная работа
Связь вектора напряжённости силового поля и разности потенциалов. Понятие о градиенте скалярной функции координат
Т.к. элементарная работа   d = d =  а а  = =  d d  , то получаем: , то получаем:  d = d =  d или • d = d d или • d = d  Учтём, что = -–напряжённость гравитационного поля. Тогда последнее соотношение примет вид: • d = Учтём, что = -–напряжённость гравитационного поля. Тогда последнее соотношение примет вид: • d =  =
=  ( (  + +  + +  ).
В векторном анализе вектор с компонентами { ).
В векторном анализе вектор с компонентами {  называется градиентом функции и обозначается либо grad называется градиентом функции и обозначается либо grad  (градиент ), либо символом (градиент ), либо символом  («набла»), называемом так же оператором Гамильтона[15] (гамильтонианом).
Используя эти обозначения, можно записать: («набла»), называемом так же оператором Гамильтона[15] (гамильтонианом).
Используя эти обозначения, можно записать:
 = grad = grad  или =
или =   Напряжённость силового поля равна градиенту потенциала данной точки поля со знаком минус.
Знак «минус» в вышеприведённых формулах означает, что вектор напряжённости силового поля направлен в сторону убывания потенциала
Связь между и
Напряжённость силового поля равна градиенту потенциала данной точки поля со знаком минус.
Знак «минус» в вышеприведённых формулах означает, что вектор напряжённости силового поля направлен в сторону убывания потенциала
Связь между и  можно также представить в виде:
d = можно также представить в виде:
d =  •cos •cos  = =  dS
где dS
где  – угол между векторами и d ; dS = | d – угол между векторами и d ; dS = | d  – проекция вектора на направление вектора d – проекция вектора на направление вектора d  Понятие о «потенциальной яме»
«Потенциальной ямой» называется область пространства, в которой потенциальная энергия U частицы меньше некоторого значения Umax.
Термин «потенциальная яма» происходит от вида графика, изображающего зависимость потенциальной энергии U частицы в силовом поле от её положения в пространстве (в случае одномерного движения от координаты x; рис.56). Такая зависимость U(x) возникает в поле сил притяжения.
Понятие о «потенциальной яме»
«Потенциальной ямой» называется область пространства, в которой потенциальная энергия U частицы меньше некоторого значения Umax.
Термин «потенциальная яма» происходит от вида графика, изображающего зависимость потенциальной энергии U частицы в силовом поле от её положения в пространстве (в случае одномерного движения от координаты x; рис.56). Такая зависимость U(x) возникает в поле сил притяжения.
 Рис.56. Схематическое изображение одномерной потенциальной ямы U(x).
Полная энергия
Рис.56. Схематическое изображение одномерной потенциальной ямы U(x).
Полная энергия  частицы – сохраняющаяся величина, поэтому изображена на графике горизонтальной линией.
В частности, при U = U(x) и Umax = частицы – сохраняющаяся величина, поэтому изображена на графике горизонтальной линией.
В частности, при U = U(x) и Umax =  имеется потенциальная яма бесконечной глубины.
Примером потенциальной ямы может служить потенциал притяжения между протоном и нейтроном, экспоненциально убывающий с увеличением расстояния между ними.
В классической механике частица с энергией имеется потенциальная яма бесконечной глубины.
Примером потенциальной ямы может служить потенциал притяжения между протоном и нейтроном, экспоненциально убывающий с увеличением расстояния между ними.
В классической механике частица с энергией  < 0 не сможет вылететь из потенциальной ямы и будет всё время двигаться в ограниченной области пространства внутри ямы (между двумя классическими точками остановки U0 = < 0 не сможет вылететь из потенциальной ямы и будет всё время двигаться в ограниченной области пространства внутри ямы (между двумя классическими точками остановки U0 =  ).
Положение частицы на «дне» ямы отвечает устойчивому равновесию и соответствует нулевой кинетической энергии частицы. Если > U0, то частица преодолевает действие сил притяжения и свободно покидает яму. Пример – движение упругого шарика, находящегося в поле сил земного притяжения, в обычной яме с жёсткими пологими стенками.
В квантовой механике, в отличие от классической, энергия частицы, находящейся в связанном состоянии в потенциальной яме может принимать лишь определённые дискретные значения, т. е. существуют дискретные уровни энергии. Однако такая дискретность уровней становится заметной лишь для систем, имеющих микроскопические размеры и массы.
Если в потенциальную яму попала частица, энергия которой ниже, чем необходимая для преодоления краёв ямы, то возникнут колебания частицы в яме. Амплитуда колебаний будет обусловлена собственной энергией частицы. Частица, находящаяся на дне потенциальной ямы, пребывает в состоянии устойчивого равновесия, то есть при отклонении частицы от точки минимума потенциальной энергии возникает сила, направленная в противоположную отклонению сторону. Если частица подчиняется квантовым законам, то, несмотря на недостаток энергии, она с определённой вероятностью может покинуть потенциальную яму (явление туннельного эффекта).
Потенциальная яма, удовлетворяющая условию:
U(x) = ).
Положение частицы на «дне» ямы отвечает устойчивому равновесию и соответствует нулевой кинетической энергии частицы. Если > U0, то частица преодолевает действие сил притяжения и свободно покидает яму. Пример – движение упругого шарика, находящегося в поле сил земного притяжения, в обычной яме с жёсткими пологими стенками.
В квантовой механике, в отличие от классической, энергия частицы, находящейся в связанном состоянии в потенциальной яме может принимать лишь определённые дискретные значения, т. е. существуют дискретные уровни энергии. Однако такая дискретность уровней становится заметной лишь для систем, имеющих микроскопические размеры и массы.
Если в потенциальную яму попала частица, энергия которой ниже, чем необходимая для преодоления краёв ямы, то возникнут колебания частицы в яме. Амплитуда колебаний будет обусловлена собственной энергией частицы. Частица, находящаяся на дне потенциальной ямы, пребывает в состоянии устойчивого равновесия, то есть при отклонении частицы от точки минимума потенциальной энергии возникает сила, направленная в противоположную отклонению сторону. Если частица подчиняется квантовым законам, то, несмотря на недостаток энергии, она с определённой вероятностью может покинуть потенциальную яму (явление туннельного эффекта).
Потенциальная яма, удовлетворяющая условию:
U(x) =  при x < 0; x > L и U(x) = 0 при 0 при x < 0; x > L и U(x) = 0 при 0  x x  L L
|
называется одномерной потенциальной ямой бесконечной глубины с плоским дном или «потенциальным ящиком» (рис. 57).

Рис. 57.
Понятие о «потенциальном барьере»
Потенциальный барьер — противоположное понятие. Это область пространства, где присутствует локальный максимум потенциальной энергии.
Потенциальный барьер – ограниченная в пространстве область высокой потенциальной энергии частицы в силовом поле, по обе стороны которой потенциальная энергия более или менее резко спадает.
Потенциальный барьер соответствует силам отталкивания.
На рис. 58изображен потенциальный барьер простой формы для случая одномерного (по оси х) движения частицы. В некоторой точке х = x0 потенциальная энергия V(х) принимает максимальное значение V0,называется высотой потенциального барьера. Потенциальный барьер делит пространство на две области (I и II), в которых потенциальная энергия частицы меньше, чем внутри потенциального барьера (в области III).

Рис. 58.
В классической механике прохождение частицы через потенциальный барьер возможно лишь в том случае, если её полная (кинетическая + потенциальная) энергия  превышает высоту потенциального барьера. ≥ V0; тогда частица пролетает над барьером. Если же энергия частицы недостаточна для преодоления барьера, < V0, то в некоторой точке x1 частица, движущаяся слева направо, останавливается и затем движется в обратном направлении. То есть потенциальный барьер является как бы непрозрачной стенкой, барьером, для частиц с энергией, меньшей высоты потенциального барьера — отсюда название «потенциальный барьер». В квантовой механике, в отличие от классической, возможно прохождение через потенциальный барьер частиц с энергией < V0 (это явление называется «туннельным эффектом») и отражение от потенциального барьера частиц с > V0. Такие особенности поведения частиц в квантовой физике непосредственно связаны с корпускулярно-волновой природой микрочастиц.
превышает высоту потенциального барьера. ≥ V0; тогда частица пролетает над барьером. Если же энергия частицы недостаточна для преодоления барьера, < V0, то в некоторой точке x1 частица, движущаяся слева направо, останавливается и затем движется в обратном направлении. То есть потенциальный барьер является как бы непрозрачной стенкой, барьером, для частиц с энергией, меньшей высоты потенциального барьера — отсюда название «потенциальный барьер». В квантовой механике, в отличие от классической, возможно прохождение через потенциальный барьер частиц с энергией < V0 (это явление называется «туннельным эффектом») и отражение от потенциального барьера частиц с > V0. Такие особенности поведения частиц в квантовой физике непосредственно связаны с корпускулярно-волновой природой микрочастиц.
На рис. 59 изображён простейший одномерный потенциальный барьер прямоугольной формы.
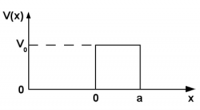
Рис. 59.
Поле центральных сил
Центральной силой называется приложенная к телу сила, линия действия которой при любом положении тела проходит через некоторую определённую точку, называемую центром силы.
Примером центральных сил являются сила тяготения, направленная к центру планеты, кулоновские силы электростатического притяжения и отталкивания и др. (рис. 60).
Центральная сила зависит только от расстояния r между взаимодействующими частицами: =  ( ).
( ).

Рис. 60. Движение двух тел вокруг центра масс O.
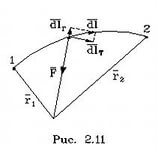
Рассмотрим работу при перемещении материальной точки в поле центральных сил (рис. 61): точка 0 – силовой центр.
М
0
Рис. 61.
Элементарная работа по перемещению точки М в поле центральных сил:
 = ( ) d
= ( ) d 
Работа перемещения точки М на конечном участке траектории 1 – 2:
A12 =  d = Ф( 2) - Ф( 1), (1)
d = Ф( 2) - Ф( 1), (1)
где Ф( ) первообразная функции ( ).
Значение определённого интеграла в формуле (1) зависит только от расстояний r1 и r2 точек 1 и 2 до силового центра 0, но не зависит от формы пути, по которому материальная точка М перешла из положения 1 в положение 2.
Таким образом, поле центральных сил – поле потенциальное, а центральные силы – консервативные.
Работа консервативных сил равна убыли потенциальной энергии:  = - dП, т.е.
= - dП, т.е.
dП = - = - ( ) d . (2)
Проинтегрировав (2), получим: П = -  ,
,
т.е. потенциальная энергия частицы, находящейся в поле центральных сил, зависит только от расстояния до силового центра: П = П( ).
Особый интерес представляют силы, обратно пропорциональные квадрату расстояния до силового центра (гравитационные, электростатические силы). Для них функция  имеет вид: =
имеет вид: =  , где
, где  - постоянная величина ( > 0 при отталкивании от центра; < 0 – в случае притяжения к центру).
- постоянная величина ( > 0 при отталкивании от центра; < 0 – в случае притяжения к центру).
Проинтегрировав последнюю формулу, получим: П = -  =
= 
 .
.
Потенциальную энергию на бесконечности (r  ) считают равной нулю, следовательно: П = . Так в случае гравитационного поля: = - mM, получаем:
) считают равной нулю, следовательно: П = . Так в случае гравитационного поля: = - mM, получаем:
П = -  - потенциальная энергия частицы массой m в гравитационном поле планеты массой M.
- потенциальная энергия частицы массой m в гравитационном поле планеты массой M.