|
|
О законе сохранения энергии и непотенциальных силах
В элементарных курсах физики закон сохранения энергии (5.23) зачастую
толкуется упрощенно. Мы попытаемся в данном параграфе дать о нем более
адекватное представление.
Прежде всего, заметим, что, сколь бы ни естественным казалось предположение о центральном характере сил взаимодействия между двумя материальными точками, оно отнюдь не универсально. Например, взаимодействие между двумя электронами, движущимися с непараллельными скоростями, к потенциальным силам не сводится. Поэтому и примеры наши с центральными силами (а они всегда потенциальны) — это именно примеры, но не доказательство.
Эксперимент — основа любой естественной науки — показывает, что все
многообразие силовых полей в рамках механики подразделяется на три
класса. Помимо консервативных сил, нам придется рассмотреть еще гироскопические и диссипативные.
Гироскопическими называются силы, работа которых всегда в точности
равна нулю. Очевидно, Fdr= 0 при F ≠0, если F┴ dr, а поскольку dr=
= v dt, то это означает F┴ v. Примеров таких сил можно привести немного,
наиболее очевидным является случай силы Лоренца, которая действует на
частицу с зарядом q в магнитном поле В:
F = q • [v В] => F ┴ v.
Эти силы, как следует из самого определения, ни к потенциальной энергии,
ни к закону сохранения энергии отношения не имеют.
Диссипативными называются силы, работа которых понижает энергию
Е = Т + U (диссипация — затухание, рассеяние энергии). Это силы трения, знакомые нам из школьного курса; к диссипативным относятся также силы вязкого сопротивления жидкости или газа (они-то и не дают парашютисту падать с ускорением д), сила радиационного торможения при ускорении заряженных частиц и многие другие. Этим классом сил обусловлено то обстоятельство, что закон сохранения энергии (5.23) в рамках одной только механики оказывается верным лишь приблизительно, с большей или меньшей точностью.
В принципе, полная энергия Е механической системы может даже расти во времени. Это просто означает, что наша система не достаточно хорошо изолирована от других тел, и над ней совершается работа извне. По этой причине точность закона (5.23) не может быть выше той точности, с которой мы можем считать законы движения не зависящими от внешнего мира.
Но как бы тщательно мы не изолировали механическую систему, сколь бы скрупулезно не учитывали количественно влияние внешней среды, мы никогда не сможем выполнить условие (5.23) с любой наперед заданной точностью, причем изменение полной энергии будет происходить именно в сторону потерь. Это означает, что вступила в игру диссипация, и предельная точность закона (5.23) определяется именно уровнем диссипации. Обычно при этом говорят: «Энергия сохраняется, но переходит в другие виды», но что такое эти «другие виды», нам еще предстоит разбираться на протяжении всего нашего курса.
Мы рассмотрим пример сил трения между твердыми телами как наиболее хрестоматийный. Популярный образ зацепляющихся неровностей на поверхности соприкасающихся тел не дает правильного понимания природы явления, ибо сам механизм зацепления остается как бы «за скобками». В действительности в основе сил трения лежит электромагнитное взаимодействие электронных оболочек атомов и молекул. Феноменологические законы (т. е. законы, обобщающие напрямую опытные данные) представляют собой усредненные и огрубленные количественные соотношения. Сформулируем их для случая сухого трения скольэюения. Этим термином называют трение между поверхностями двух твердых тел, скользящих друг по другу при отсутствии между ними какой-либо прослойки, например смазки. В случае сухого трения сила трения возникает не только при скольжении одной поверхности по другой, но и при попытках вызвать такое скольжение у покоящегося вначале тела. В последнем случае она называется силой трения покоя. Рассмотрим два соприкасающихся тела 1 и 2, причем тело 2 закреплено неподвижно (рис. 5.7). Пусть тело 1 прижимается к телу 2 с силой Fn,
направленной по нормали к поверхности соприкосновения тел. Она называется силой нормального давления.
Она может быть обусловлена притяжением первого тела к Земле (силой тяжести) или другими причинами.
Если тело 1 (вместе с телом 2) в инерциальной системе отсчета не перемещается в вертикальном направлении и его ускорение в этом направлении равно нулю, то это
означает согласно второму закону Ньютона, что на него
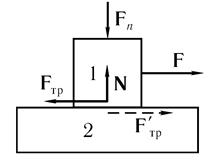
Рис.5.7
со стороны второго тела действует уравновешивающая сила, равная по модулю Fn и направленная вверх. Ее называют силой реакции опоры и обычно обозначают через N. По своему происхождению она аналогична упругой силе и также обусловлена электромагнитным взаимодействием молекул в поверхностных областях тела 1 и тела 2.
Если попытаться переместить первое тело, подействовав на него внешней горизонтальной силой F, то обнаружится, что для каждой конкретной пары тел и каждого значения силы нормального давления имеется определенное минимальное по модулю значение F0 силы F, при котором тело 1 удается сдвинуть с места. При значениях внешней силы, заключенных в пределах 0 < F < F0, тело остается в покое. По второму закону Ньютона
это возможно только в том случае, когда сила F уравновешивается равной ей и противоположно направленной силой, которая и есть сила трения покоя FTp (см. рис. 5.7). Эта сила, действующая на тело 1 со стороны тела 2, по модулю равна величине внешней силы F до тех пор, пока последняя не превосходит наибольшего значения силы трения покоя Fq. Из опыта следует, что во многих практически интересных ситуациях сила F0 оказывается пропорциональна нормальному давлению Fn: F0 = α0Fn.
Когда внешняя сила F превзойдет по модулю F0, тело начнет скользить,
причем до некоторого значения скорости проскальзывания движение будет
равномерным. При этом, как следует из второго закона Ньютона, сила тре-
трения должна быть равна по модулю составляющей приложенной силы, па-
параллельной соприкасающимся поверхностям, и полностью ее уравновеши-
уравновешивать. Отсутствие у тела ускорения означает, что скорость проскальзывания
зависит от приложенной силы, и притом нередко весьма сложным образом.
Увеличивая приложенную силу F', мы в конце концов превзойдем предель-
предельную силу трения скольжения, и далее движение будет происходить уже с
ускорением
ma = F+ FTp; FTp = Fmax = αFn (5.26)
причем при специальной обработке соприкасающихся поверхностей сила трения скольжения может оказаться практически не зависящей от скорости движения тела и, что особенно интересно — от площади соприкосновения трущихся тел. Разумеется, эти свойства не являются ни вполне точными, ни вполне универсальными, но все же правильно описывают большой массив экспериментальных данных. Безразмерный коэффициент пропорциональности называется коэффициентом трения (соответственно покоя α0 или скольжения α. Он зависит от природы и состояния трущихся поверхностей, в частности от их шероховатости. Коэффициенты трения покоя и скольжения практически никогда не совпадают друг с другом.
Попробуем проанализировать эту ситуацию с точки зрения закона сохранения энергии. Из (5.26) легко усмотреть, что работа силы F уже не равна приращению кинетической энергии тела mv2/2. Часть ее, равная работе силы трения ∫ FTp dx, как бы «исчезает» — это и есть диссипация. Еще выразительнее проявляются диссипативные эффекты при
FTp < Fmax
— работа совершается, но кинетическая энергия не изменяется.
Энергия, соответствующая работе сил трения, переходит к атомам поверхности — увеличивается их кинетическая энергия. Это увеличение кинетической энергии атомов находит свое отражение в повышении температуры трущихся поверхностей. (Подробнее о связи хаотического движения атомов вещества с его тепловыми свойствами будет рассказано в одном из последующих разделов курса — термодинамике). Поэтому говорят, что «потерянная» из-за трения кинетическая энергия переходит в тепло. Она может переходить также в акустические возбуждения, электромагнитные волны и даже
радиоактивные излучения, но сути дела это не меняет.
Получим формальное соотношение, определяющее изменение полной энергии материальной точки из-за действия на нее неконсервативных сил. Для этого воспользуемся соотношением (5.9), связывающим бесконечно малое изменение кинетической энергии с работой:
dT = F dr = (FK + FH) dr = δAK + dAH,
где FK обозначает результирующую всех консервативных сил, a FH — результирующую всех неконсервативных сил. Пусть тело совершает конечное перемещение по некоторой траектории из точки 1 в точку 2. Тогда бесконечно малые изменения в полученных соотношениях следует просуммировать вдоль этого участка траектории:
2 2
∫ dE = ∫δAH, или E2-Ei= AH(1 -> 2).
1 1
Итак: при действии на материальную точку неконсервативных сил изменение ее полной энергии на любом участке траектории равно работе на этом участке результирующей неконсервативных сил. В частности, работа сил трения скольжения всегда отрицательна, так как они всегда направлены против перемещения тела, поэтому силы трения всегда приводят к уменьшению полной механической энергии движущегося тела.
Таким образом, когда мы говорим, что в изолированной системе энергия сохраняется, это означает, что энергия может переходить из одной формы в другую, но ее количество остается постоянным, оно не зависит от времени.
Закон сохранения энергии является строгим законом природы, справедливым для всех известных взаимодействий.
Простые примеры
Закон сохранения энергии — не только фундаментальный закон природы, но и эффективный метод решения задач. В этом отношении полезны любые законы сохранения (как принято называть их в механике — интегралы движения), и принцип их использования совершенно универсален — не решая уравнений движения (например, не вычисляя траекторию материальной точки), сразу же связать начальное и конечное состояния системы.
Именно по такому принципу мы выводили формулу Циолковского из закона сохранения импульса.
Начнем с движения материальной точки под действием силы тяжести.
Чтобы использовать закон сохранения энергии для исследования движения, необходимо сначала определить конкретное выражение для потенциальной энергии, то есть найти ее зависимость от положения тела в пространстве. Для этого необходимо выбрать в пространстве некоторую произвольную точку с радиусом-вектором го и вычислить работу, совершаемую силой тяжести при перемещении материальной точки с массой m из заданного положения r в положение r0.
Чтобы сделать изложенную выше процедуру более наглядной, воспользуемся рис. 5.8.

рис 5.8
На этом рисунке положение материальной точки с массой m определяется ее радиусом-вектором r в декартовой системе координат xyz, у которой плоскость хОу совпадает с поверхностью Земли. Для определения потенциальной энергии выберем точку с радиусом-вектором r0 в любом месте на поверхности Земли. Работу силы тяжести при перемещении из точки г в точку r0, которая, как мы знаем, не зависит от пути, вычислим вдоль пути, состоящего из двух отрезков: вдоль вертикали до поверхности и далее вдоль произвольной траектории по поверхности до точки с радиусом-вектором r0.
На первом участке работа равна произведению модуля силы тяжести mg на величину пути до поверхности Земли, т. е. на координату z нашей материальной точки. А на втором участке работа равна нулю, так как здесь сила всюду перпендикулярна перемещению. Таким образом, работа силы тяжести при перемещении материальной точки из положения с радиусом- вектором r в положение с радиусом-вектором r0, то есть потенциальная
энергия,
U(r) = mgz.
Следовательно, закон сохранения энергии при движении материальной точки под действием только силы тяжести имеет вид следующего соотношения, справедливого для любой точки траектории:
Е = mv2(r)/2 + mgz = const. (5.27)
Если, например, тело начинает падать с некоторой высоты z0 с нулевой начальной скоростью, то из закона сохранения энергии (5.27) легко получить
закон нарастания скорости по мере приближения тела к поверхности:
mgz0= mgz + mv2(z)/2 => v(z) = √(2g(z0 - z)).
Определим выражение для потенциальной энергии и для второго простейшего типа движения материальной точки, рассмотренного в предыдущей главе, - для гармонических колебаний груза по поверхности под действием упругой силы со стороны пружины (см. рис. 4.5, 4.6). В качестве произвольного начального положения с радиусом-вектором r0 в определении потенциальной энергии используем равновесное положение груза при х = 0. Тогда потенциальная энергия в положении х равна работе упругой силы Fy = -кх
при перемещении материальной точки из положения с координатой х в положение с координатой х = 0: U(x) = kx2/2. Таким образом, закон сохранения полной энергии при гармонических колебаниях материальной точки по поверхности записывается в виде
mv2(x)/2 + кх2/2 = const. (5.28)
С помощью этого соотношения можно решать многие задачи о гармонических колебаниях, не прибегая к интегрированию уравнений движения. Так например, если нам задана начальная скорость груза v0 в положении равновесия х = 0, то из (5.28) легко найти амплитуду x0 возникающих после этого гармонических колебаний. При максимальном отклонении скорость груза, а следовательно и его кинетическая энергия равны нулю. Применяя (5.28) к начальному моменту времени и к моменту, когда достигается максимальное отклонение, получаем
mv02/2 = kx02/2, х0= v0√(m/k).
Особо подчеркнем, что закон сохранения энергии при движении во внешнем силовом поле справедлив только при движении материальной точки под действием сил, постоянных во времени. (В противном случае условие (512) не было бы инвариантно по отношению к выбору траектории r(t)). О таком движении говорят иногда, как о движении в постоянном силовом поле, понимая под словом «поле» пространство, каждой точке которого соответствует вектор действующей в пространстве силы.
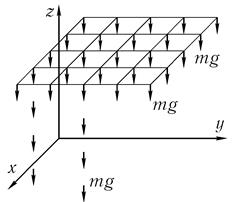
(На рис. 5.9 в качестве примера изображено постоянное силовое поле силы тяжести). Если условие постоянства силового поля не выполняется, полная энергия материальной точки, вообще говоря, не сохраняется. С одним из таких примеров мы имели дело в предыдущей главе, когда рассматривали явление резонанса, возникающего при колебаниях тела, на которое помимо упругой силы действует еще внешняя вынуждающая сила. Полная энергия в этом случае растет с ростом амплитуды вынужденных колебаний.
Полезно рассмотреть также пример, когда для решения задачи используется не сохранение энергии, а ее полная диссипация. Это также нередко дает возможность получить простой ответ, не решая уравнений движения.
Уменьшение энергии, обусловленное действием сил трения, можно определить с помощью соотношения между изменением кинетической энергии и работой (5.11), которое часто оказывается полезным при решении задач.
В качестве наглядного примера рассмотрим такую задачу (рис. 5.10). На горизонтальной поверхности лежит тело массы m, которому в начальный момент сообщают скорость поступательного движения v0. Из-за трения о поверхность тело останавливается на некотором расстоянии l от исходного

Рис- 5.10
положения. Чему равно это расстояние, если коэффициент трения равен α
Ответ можно, конечно, найти путем решения соответствующего уравнения
движения (второго закона Ньютона). Но решение можно проще и короче
получить с помощью соотношения (5.11), из которого сразу получаем
mv02/2 = FTpl = αmgl, l = v02/(2αg)
Конечно, результат этот приблизителен, а иногда может быть и просто
неверен, поскольку мы воспользовались приближением постоянной силы
трения. Но принцип решения подобных задач наш пример демонстрирует
должным образом.