|
|
Регулирование изменением подводимого напряжения
| Рисунок 6.18 – Механические характеристики АД при изменении подводимого напряжения: а – обычный КЗ двигатель; б – двигатель с двухслойным (массивным) ротором |

Возможность регулирования АД изменением подводимого напряжения подтверждается графиком (рисунок 6.18), на котором показаны механические характеристики АД для разных значений напряжения U1 и график момента сопротивления.
Точка "А" соответствует номинальному режиму. При уменьше-
нии напряжения вращающий момент уменьшается пропорционально U12. Характеристика 3 соответствует уменьшению напряжения примерно на 30%. Скольжение при этом увеличивается, а скорость вращения уменьшается примерно на 20% от номинальной, т.е. диапазон регулирования оказывается небольшим. Практически диапазон регулирования ограничивается величиной критического скольжения, одновременно резко снижается перегрузочная способность.
Изменение подводимого к двигателю напряжения может осуществляться различными способами: применением источника с регулируемым напряжением, включением в цепь статора дросселя насыщения, регулируемого автотрансформатора или тиристорных коммутаторов.
Данный способ регулирования не является экономичным, т.к.
при увеличении скольжения s увеличиваются потери в роторе ΔРэл2 и его нагрев, и в настоящее время применяется редко, в основном в случаях, когда вопрос экономичности является второстепенным.
Следует в то же время отметить, что для АД с повышенным активным сопротивлением обмотки ротора пределы регулирования данным способом значительно расширяются, что показано на рисунке 6.18(б). Подобные свойства имеет двигатель с массивным или двухслойным ротором, разработанный в нашей стране под руководством профессора Могильникова B.C.
Эти двигатели, кроме того, имеют отличные пусковые характеристики (большой пусковой момент и малый пусковой ток), лучшие виброшумовые характеристики, что особенно актуально для судовых ЭЭС
.
Регулирование изменением активного сопротивления
Цепи ротора
Этот способ регулирования возможен только в двигателях с фазным ротором. Схема регулирования ничем не отличается от схемы пуска АД с фазным ротором (рисунок 6.15), однако регулировочные реостаты должны быть рассчитаны на длительную работу.
Механические характеристики двигателя при изменении активного сопротивления ротора показаны на рисунке 6.19. Процесс регулирования происходит следующим образом. Работа АД в номинальном режиме характеризуется точкой «А» на естественной характеристике. При введении в цепь ротора сопротивления rд скорость в первый момент не уменьшается, а ток ротора снижается до величины
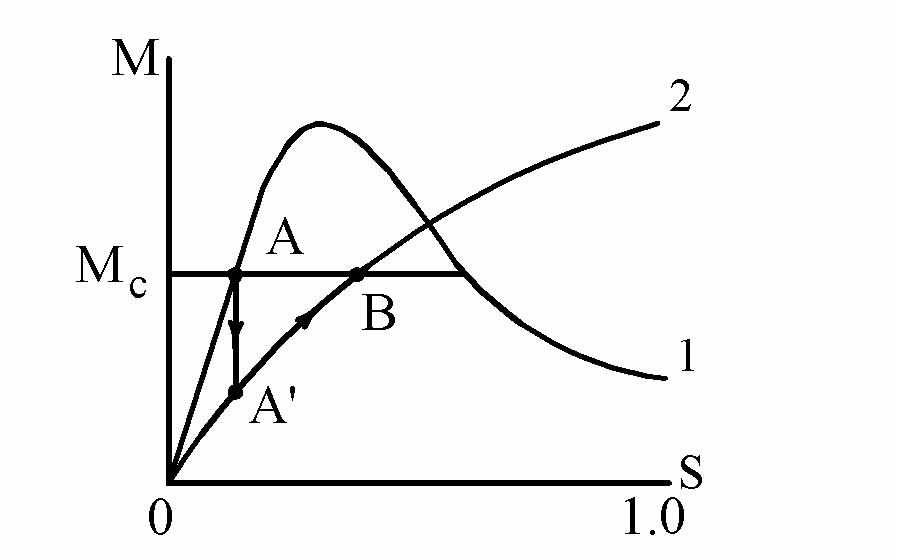 Уменьшение тока приводит к уменьшению вращающего момента (точка
Уменьшение тока приводит к уменьшению вращающего момента (точка  ) и ротор начнет тормозиться, т.е. скольжение будет возрастать. Соответственно возрастающему скольжению будет увеличиваться
) и ротор начнет тормозиться, т.е. скольжение будет возрастать. Соответственно возрастающему скольжению будет увеличиваться  и ток
и ток  . Процесс уменьшения скорости и увеличение тока
. Процесс уменьшения скорости и увеличение тока  будет происходить до тех пор, пока составляющая этого тока
будет происходить до тех пор, пока составляющая этого тока  не достигнет прежнего значения, а вращающий момент
не достигнет прежнего значения, а вращающий момент

| Рисунок 6.19 – Механические характеристики АД при изменении активного сопротивления ротора |
Указанным способом можно регулировать скорость АД в широких пределах, а плавность регулирования скорости будет зависеть от числа ступеней регулировочного реостата. В то же время этот способ регулирования является очень неэкономичным, так как связан с большими потерями энергии в регулировочном реостате. КПД двигателя при регулировании тем меньше, чем меньшая скорость вращения ротора достигается в результате регулирования.
Несмотря на неэкономичность данного способа регулирования, он находит применение на практике. Его положительным качеством является то, что потери скольжения выделяются в сопротивлении ре-
гулировочного реостата и не приводят к повышенному нагреву ротора.