|
|
АКСОНОМЕТРИИ ПРОСТРАНСТВЕННЫХ ОБЪЕКТОВ.
ТИПОВЫЕ ЗАДАЧИ
Приёмы построения аксонометрических изображений пространственных объектов не зависят от типа аксонометрической проекции. Аксонометрическое изображение обычно строят на основе ортогональных проекций предмета. Поэтому следует по заданному комплексному чертежу представить форму предмета, выбрать тип аксонометрии (если он не определён заданием на графическую работу) и после этого приступить к построению аксонометрии.
При выборе типа аксонометрии следует руководствоваться следующими соображениями. Наглядность изображения на аксонометрических чертежах зависит от выбора направления проецирования. Изометрию рекомендуется применять в тех случаях, когда все видимые стороны детали равноценны для изображения. Диметрия лучше определяет форму предмета в том случае, когда наибольшая часть её элементов, характеризующих особенности формы, сосредоточена на одной из сторон; в этом случае указанную сторону располагают на аксонометрии параллельно фронтальной плоскости проекций. Для сравнения на рис. 26а представлена изометрия и на рис. 26б диметрия некоторой схематизированной детали.
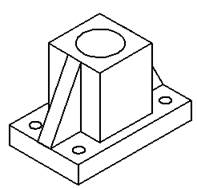
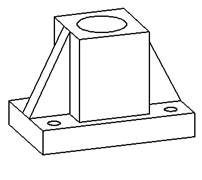
а) б)
Рис. 26
На аксонометрических чертежах пространственных объектов для отображения внутренних элементов часто применяют разрезы, которые выполняют, как правило, координатными плоскостями, (или плоскостями, параллельными им). Линии штриховки сечений в аксонометрических проекциях наносят параллельно одной из диагоналей проекций квадратов (ромбов или параллелограммов), лежащих в соответствующих координатных плоскостях, стороны которых параллельны аксонометрическим осям (рис. 27а для диметрии и рис. 27б для изометрии). При этом, в отличие от ортогональных проекций, спицы маховиков и шкивов, ребра жесткости и подобные элементы в аксонометрии штрихуют.

а) б)
Рис. 27
Многогранники
 Как и на ортогональном чертеже, многогранник в аксонометрии задаётся проекциями его вершин (точек), которые затем соединяются отрезками прямых, образуя рёбра. На рис. 29 продемонстрировано поэтапное построение диметрии прямой шестигранной призмы (ортогональный чертёж – на рис. 28):
Как и на ортогональном чертеже, многогранник в аксонометрии задаётся проекциями его вершин (точек), которые затем соединяются отрезками прямых, образуя рёбра. На рис. 29 продемонстрировано поэтапное построение диметрии прямой шестигранной призмы (ортогональный чертёж – на рис. 28):
- связываем с призмой систему координат, начало координат выбираем в одной из характерных точек (в данном случае – в центре основания), рис. 28;
- строим аксонометрические оси и определяемся с коэффициентами искажения;
- в горизонтальной плоскости строим основание призмы (рис. 29а), правила такого построения изложены в параграфе 3.2, результат – в табл. 1;
- из вершин основания проводим направления боко-
Рис. 28 вых рёбер и откладываем на них отрезки, равные высоте призмы, - получаем вершины верхнего основания (рис. 29б);
- строим верхнее основание, соединяя полученные вершины (рис. 29в);
- обводим проекцию с учётом видимости (рис. 29г).
Другим вариантом построения может быть следующий: вначале строим верхнее и нижнее основания, а затем – боковые рёбра.

а) б) в) г)
Рис. 29
На рис. 30 представлены прямоугольные диметрии ещё нескольких призм с основаниями в плоскости П1 , которые встречаются при выполнении расчётно-графических работ на кафедре. На рис. 31 изображены те же призмы с удалённой одной четвёртой частью.

Рис. 30

Рис. 31
 На рис. 33 показано поэтапное построение аксонометрии шестигранной пирамиды, ортогональный чертёж которой – на рис. 32: определяем связанную с многогранником систему координат, строим аксонометрические оси, далее – нижнее (рис. 33а) и верхнее (рис. 33б) основания, соединяем соответствующие вершины оснований (получаем боковые рёбра, рис. 33в), обводим с учётом видимости (рис. 33г).
На рис. 33 показано поэтапное построение аксонометрии шестигранной пирамиды, ортогональный чертёж которой – на рис. 32: определяем связанную с многогранником систему координат, строим аксонометрические оси, далее – нижнее (рис. 33а) и верхнее (рис. 33б) основания, соединяем соответствующие вершины оснований (получаем боковые рёбра, рис. 33в), обводим с учётом видимости (рис. 33г).
На рис. 34 представлены прямоугольные диметрии некоторых пирамид, которые встречаются при выполне- Рис. 32 нии графических работ на кафедре; основания пирамид лежат в горизонтальной плоскости проекций. На рис. 35 изображены те же пирамиды с удалённой одной четвёртой частью.

а) б) в) г)
Рис. 33

Рис. 34

Рис. 35
На рис. 36 изображены прямоугольные изометрии четырёх призм с основаниями, параллельными фронтальной плоскости проекций П2 (начало координат выбрано в точке за пределами тел). На рис. 37 – изометрии двух призм, основания которых параллельны профильной плоскости проекций П3 (в том числе с удалённой одной четвёртой частью).

Рис. 36

Рис. 37
При выполнении и защите семестровых графических работ по теме «Многогранники» и в рабочей тетради предлагается ряд типовых задач.
Задача 4.1 Определение координат точки, лежащей на поверхности многогранника.
Д а н о: аксонометрическая проекция точки К, принадлежащей поверхности пирамиды (рис. 38а). О п р е д е л и т ь: координаты точки К (положение точки в заданной системе координат). На рис. 38 продемонстрированы этапы решения.
& Следует помнить, что точка принадлежит поверхности, если она принадлежит линии, лежащей на этой поверхности.
Для определения координат точки необходимо построить в аксонометрии координатную ломаную линию, для чего достаточно определить на чертеже положение одной из вторичных проекций точки. Алгоритм решения задачи:
- проводим на поверхности пирамиды (в её грани) через точку К любую дополнительную прямую линию (в данном случае параллельно ребру основания) и строим вторичную проекцию линии, для чего используется опорная точка 1, лежащая во фронтальной плоскости проекций, а значит, вторичная горизонтальная проекция точки принадлежит оси x (рис. 38б);
- проецируем точку К на плоскость П1 – строим вторичную проекцию К', принадлежащую вторичной проекции линии (рис. 38в);
- строим ломаную координатную линию и определяем аксонометрические координаты (рис. 38г);
- в зависимости от типа аксонометрической проекции и принятых коэффициентов искажения рассчитываем по формулам (1.3) декартовы координаты.

а) б) в) г)
Рис. 38
Задача 4.2 Построение сечения многогранника плоскостью.
Д а н о: аксонометрическая проекция пирамиды SABC, основание которой ABC принадлежит горизонтальной плоскости проекций (S' – вторичная проекция вершины пирамиды), и плоскость α(рис. 39а). П о с т р о и т ь: сечение пирамиды заданной плоскостью.
& Сечением многогранника плоскостью является многоугольник, вершины которого определяются как точки пересечения рёбер многогранника с заданной плоскостью.
Последовательность построений состоит в реализации на аксонометрическом чертеже определённых этапов (рис. 39):
- анализируем положение заданной плоскостиα по отношению к плоскостям проекций; в нашем случае задана горизонтально-проецирующая плоскость (рис. 8д), что облегчает построение точек пересечения рёбер многогранника с плоскостью;
- на горизонтальной проекции определяем точки пересечения вторичных проекций рёбер многогранника с секущей плоскостью (точки 1,2,3,4) и строим их на аксонометрических проекциях рёбер (рис. 39б), при этом аксонометрии точек 1 и 2 совпадают с их вторичными проекциями;
- соединяем попарно построенные точки, помня о том, что соединять можно только точки, лежащие на одной грани (рис. 39в).

а) б) в)
Рис. 39
Тела вращения
В составе формы многих изделий встречаются поверхности вращения: прямой круговой цилиндр, конус, сфера. Построение аксонометрических проекций цилиндра и конуса заключается в построении аксонометрической проекции основания, нахождении аксонометрической проекции высоты (или длины) геометрического тела и отображении на этой основе остальной поверхности геометрических тел. На рис. 41 продемонстрирована последовательность построения изометрии вертикального цилиндра (рис. 40), основание которого параллельно плоскости xOy (горизонтальной); начало координат – в центре нижнего основания. Для этого необходимо:
 - построить аксонометрические оси и определиться с коэффициентами искажения;
- построить аксонометрические оси и определиться с коэффициентами искажения;
- построить основание по правилам построения аксонометрических проекций окружности (эллипс или заменяющий его овал), рис. 41а;
Рис. 40 - с учётом высоты цилиндра построить верхнее основание, каждая точка которого может быть построена также по точкам нижнего основания путём откладывания размера высоты цилиндра на линии, параллельной аксонометрической оси z; при замене эллипса овалом таким же приёмом можно построить центры дуг (рис. 41б);

а) б) в) г)
Рис. 41
- провести касательные к двум эллипсам, получая изображения крайних (очерковых) образующих и цилиндра в целом (рис.41в);
- обвести цилиндр с учетом видимости (рис.41г).
На рис. 42 показаны аксонометрии цилиндров, каждый из которых ориентирован перпендикулярно одной из плоскостей проекций (соответственно П1, П2, и П3), при этом построение цилиндров с горизонтально расположенными осями аналогично изложенному выше. На рис. 43 те же цилиндры изображены с удалёнными по координатным плоскостям четвертями.

Рис. 42

Рис. 43
Построение аксонометрии конуса происходит по похожей схеме (рис. 44): строим аксонометрические оси, затем – нижнее основание (начало связанной с конусом системы координат принимаем в его центре), потом - вершину конуса, проводим очерковые образующие (касательно к основанию), обводим с учётом видимости.

Рис. 44
На рис. 45 показаны аксонометрии усечённого конуса при различных положениях по отношению к плоскостям проекций; здесь на высоте конуса строится верхнее основание и очерковые образующие проводятся касательно обоим эллипсам. На рис. 46 те же конуса изображены с удалёнными четвертями.

Рис.45
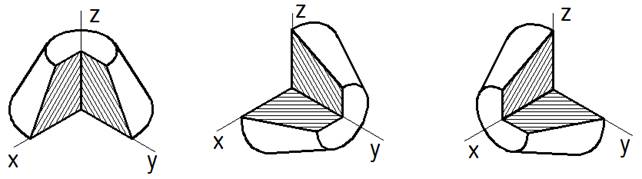
Рис. 46
Аксонометрической проекцией сферы всегда является окружность, описанная из проекции центра сферы и касательная к эллипсам, построенным в координатных плоскостях (огибающая их). На рис. 47 изображены прямоугольные изометрии сферы, в том числе с удалённой четвертой и восьмой частями. Радиус окружности (проекции сферы) равен 1,22Rсф (больше натуры в 1,22 раза) при приведенных коэффициентах искажения и Rсф при действительных коэффициентах. Здесь видно, что «северный» и «южный» полюса не принадлежат очерковой окружности, их расстояние до центра сферы равны радиусу сферы (или 0,82 его величины). На рис. 48 изображена сфера в прямоугольной диметрии, при этом радиус окружности (проекции сферы) равен соответственно 1,06 Rсф (больше натуры в 1,06 раза) или Rсф.

Рис. 47

Рис.48
При выполнении и защите семестровых графических работ по теме «Тела вращения» и решении задач в рабочей тетради предлагается ряд типовых задач.
Задача 4.3 Определение координат точки на поверхности вращения.
Д а н о: аксонометрическая проекция точки К, принадлежащей поверхности прямого кругового конуса (рис. 49а). О п р е д е л и т ь: координаты точки К (положение точки в заданной системе координат). На рис. 49 продемонстрированы этапы решения.
& Следует помнить, что точка принадлежит поверхности, если она принадлежит линии, лежащей на этой поверхности. В качестве линии на поверхности конуса следует выбирать прямолинейную образующую.
Для определения координат точки необходимо построить в аксонометрии координатную ломаную линию, для чего достаточно определить положение одной из вторичных проекций точки (в данном случае – горизонтальной).
Алгоритм решения задачи:
- проводим на поверхности конуса через точку К образующую линию (в данном случае линию S1) и строим вторичную проекцию линии (рис. 49б);
- проецируем точку К на плоскость П1 – строим вторичную проекцию К', принадлежащую вторичной проекции образующей (рис. 49в);
- строим ломаную координатную линию и определяем аксонометрические координаты (рис. 49г);
- в зависимости от типа аксонометрической проекции и принятых коэффициентов искажения рассчитываем по формулам (1.3) декартовы координаты.

а) б) в) г)
Рис. 49
Задача 4.4 Построение аксонометрии усечённого тела вращения.
Д а н о: аксонометрическая и вторичная фронтальная проекции прямого кругового цилиндра, а также фронтально-проецирующая плоскость α(рис. 50а).
П о с т р о и т ь: линию пересечения (сечение) цилиндра плоскостью.
& Сечением цилиндра в данном случае является плоская кривая –эллипс, точки которого одновременно принадлежат поверхности цилиндра и секущей плоскости. Для определения линии пересечения (сечения) надо построить ряд точек, удовлетворяющих этому условию.
Любая точка сечения строится как пересечение образующей цилиндра с секущей плоскостью. При заданной проецирующей плоскости эти точки легко определяются на фронтальной плоскости проекций. Алгоритм решения задачи:
- вначале строим точки, определяющие большую (точки A и B) и малую (точки C и D) оси, как точки пересечения образующих цилиндра, параллельных плоскостям проекций П2 и П3. Размер большой оси эллипса зависит от наклона плоскости α, а размер малой оси всегда равен диаметру цилиндра (рис. 50б);
- строим дополнительные точки как пересечение произвольных образующих с плоскостью α(пример – точка 1 на рис. 50в); при этом учитываем двойную симметрию точек эллипса относительно большой и малой осей. Обводим полученное сечение (рис. 50в).
Дополнительные точки в данном примере можно было не определять, а строить эллипс по большой и малой осям (рис. 24).

а) б) в)
Рис. 50
Задача 4.5 Построение линии пересечения поверхностей вращения.
Д а н о: аксонометрические проекции двух цилиндрических поверхностей (круговых цилиндров одинакового диаметра), рис. 51а. П о с т р о и т ь: линию пересечения цилиндров. На рис. 51 приведены этапы решения задачи.
& Результатом пересечения двух поверхностей вращения является в общем случае пространственная кривая линия, все точки которой одновременно принадлежат обеим поверхностям. Для определения линии пересечения надо построить ряд точек, удовлетворяющих этому условию.
Построения можно выполнять по координатам точек, принадлежащих линии пересечения и взятых с комплексного чертежа (ортогональных проекций), или строить линию пересечения непосредственно на аксонометрическом изображении, используя вспомогательные секущие поверхности (чаще всего плоскости, которые позволяют получить простые в построении линии пересечения вспомогательных плоскостей с заданными поверхностями). В этом случае каждая точка искомой линии пересечения поверхностей строится как результат пересечения линий одной поверхности с линиями другой. Алгоритм решения задачи:
- определяем положение вспомогательных секущих плоскостей (посредников); в данном случае выбираем посредники α параллельными осям цилиндров (а также параллельными плоскости П2), такие посредники пересекают цилиндры по прямолинейным образующим;
- для каждой вспомогательной секущей плоскости строим линии её пересечения с заданными цилиндрами, в данном примере – прямолинейные образующие (рис. 51б);
- строим точки пересечения образующих, полученных на разных цилиндрах от одного посредника (рис. 51б);
- определяем видимость, при этом точка считается видимой, если она лежит на видимых частях обеих поверхностей; обводим линию по полученным точкам с учётом видимости (рис. 51в).

а) б) в)
Рис. 51