|
|
Вихідні дані до розрахунку
При дослідженні кривошипно-шатунного механізму припускають, що кутова швидкість w=const, тому всі кінематичні величини можуть бути виражені у функції кута повороту колінчастого вала j. Розглядаються параметри для аксіального кривошипно-шатунного механізму поршневого ДВЗ. Для дезаксіальних кривошипно-шатунних механізмів при невеликих значеннях дезаксіала (z = A/R < 0,1) співвідношення приблизно такі ж, як і для аксіальних, при z = A/R > 0,1 кінематичні характеристики розглянуті в літературі [8].
Вихідними даними до розрахунку є (рисунок 1.1):
- радіус кривошипа колінчастого вала R, м:
 (1.1)
(1.1)
де  – хід поршня за результатами теплового розрахунку, м.
– хід поршня за результатами теплового розрахунку, м.
- довжина шатуна L, м (відстань між центрами поршневої і кривошипної голівок) та відносна довжина шатуна l = R/L. Параметр l при виконанні розрахунку доцільно приймати опираючись на обраний прототип. У сучасних ДВЗ значення l дорівнюють 0,24…0,28 для ДВЗ з примусовим запалюванням і 0,26…0,30 для дизелів. Відповідно до прийнятого значення l розраховують L.
- середня кутова швидкість колінчастого вала w, рад/с:
 (1.2)
(1.2)
де n – частота обертання колінчастого вала, хв–1 (у курсових проектах n = nN).
Кінематичний розрахунок проводять для діапазону кутів повороту колінчастого вала (п.к.в.) j від 0 до 360º. Крок розрахунків бажано приймати 10º. Якщо двигун, що проектується, є 5-тициліндровим, то крок приймають рівним 12º (це необхідно для того, щоб при виконанні розрахунку сумарного крутного моменту у таблиці були такі значення кутів j двигуна, при якихпочинаються робочі ходи у циліндрах).
Переміщення поршня
За вихідне приймають положення поршня у верхній мертвій точці (ВМТ). Значення j = 0 приймають на початку процесу впуску.
При повороті кривошипа на кут j, º, переміщення поршня x,м, від його початкового положення у ВМТ визначається залежністю:
x = R×(1 - cosj) + L×(1 - cosb), (1.3)
де b – кут відхилення осі шатуна від осі циліндра, º.
Враховуючи параметр l, переміщення поршня визначає залежність:
 (1.4)
(1.4)
Кути j і b зв'язані співвідношенням:
L×sinb = R×sinj. (1.5)
Тоді sinb = l×sinj, відповідно,
b = arcsin(l×sinj). (1.6)
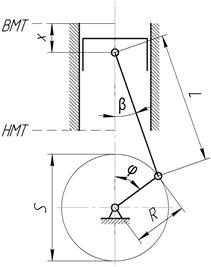
Рисунок 1.1 – Схема для визначення кінематичних характеристик КШМ
Шляхом перетворень і розкладання вираження (1.4) у біноміальний ряд для членів першого і другого порядків одержуємо залежність для x:
 (1.7)
(1.7)
Швидкість поршня
Рівняння швидкості поршня визначається диференціюванням залежності для переміщення (1.6). Узявши першу похідну від правої частини цього рівняння за часом, одержимо вираз:
 (1.8)
(1.8)
При русі поршня від верхньої мертвої точки (ВМТ) до нижньої мертвої точки (НМТ) максимальне значення швидкості поршня досягається при куті повороту кривошипа j менше 90°, а при русі в зворотному напрямку – при куті j більше 270°.
Прискорення поршня
Прискорення поршня визначається як похідна від швидкості за часом:
j = R×(cosj + l×cos2j)×w2. (1.9)
Поршень має екстремальні значення прискорення при j = 0 і j =180°. При j = 0 (у ВМТ) абсолютне значення прискорення поршня максимально. При j = 180° (у НМТ) абсолютне значення прискорення поршня менше за модулем і протилежне за знаком.
Значення прискорення поршня j = 0 відповідає куту повороту кривошипа, при якому швидкість поршня має максимальне значення. При l < 0,25 прискорення досягає найбільшого негативного значення тільки один раз. При l > 0,25 прискорення досягає негативного максимуму двічі (по обидві сторони від НМТ). У цьому випадку мінімальне прискорення jMIN, м/с2, визначають за формулою:
 (1.10)
(1.10)
Рисунок 1.2 – Переміщення поршня в залежності від кута повороту колінчастого вала

Рисунок 1.3 – Швидкість поршня в залежності від кута повороту колінчастого вала

Рисунок 1.4 – Прискорення поршня в залежності від кута повороту колінчастого вала
Результати розрахунку переміщення (формула (1.7)), швидкості (1.8) і прискорення (1.9) поршня від кута повороту колінчастого вала оформлюють у вигляді таблиці (таблиця 1.1). За результатами розрахунків будують графіки залежностей переміщення, швидкості і прискорення поршня від кута повороту колінчастого вала, зразки яких наведені на рисунках 1.2÷1.4.
Застосування ЕОМ дозволяє значно полегшити розрахунки й аналіз їхніх результатів. При використанні програмних табличних процесорів (наприклад, Microsoft Excel) необхідно приділити особисту увагу розрахунку тригонометричних функцій, а саме, перевести спочатку значення кута j із градусів у радіани:
 (1.11)
(1.11)
При виконанні розрахунків треба звернути увагу на те, що переміщення поршня x при куті повороту кривошипу 180º має дорівнювати ходу поршня S, максимальне прискорення може складати до 20 000 м/с2.
Таблиця 1.1 – Результати кінематичного розрахунку ДВЗ
| j, º | x, м | v, м/с | j, м/с2 |
| … | |||