|
|
Определение отношения сигнал шум на выходе систем с частотной модуляцией.
В системах и АМ сигналами спектр модулирующего сигнала просто смещается по частоте, а форма его не меняется(по виду спектра модулированного сигнала можно определить вид спектра модулирующего сигнала). Частотная модуляция нелинейна, и это обстоятельство усложняет оценку помехоустойчивости.
схема приёмника ЧМ-сигналов :

На входе приёмника стоит входной полосовой фильтр, который пропускает весь спектр ЧМ-сигнала, т.е. имеет полосу пропускания, равную девиации частоты, и среднюю частоту  Далее сигнал поступает на частотный детектор, входной сигнал которого пропорционален текущей частоте.
Далее сигнал поступает на частотный детектор, входной сигнал которого пропорционален текущей частоте.
После частотного детектора стоит ФНЧ с полосой пропускания равной ширине спектра сигнала f(t).
Оценивая, помехоустойчивость систем с частотной модуляцией, допустим, что на выходе приёмника мощность сигнала и шума можно находить независимо одну от другой.
Сначала рассмотрим сигнал в отсутствии шума.

Мощность сигнала

Выходной сигнал частотного детектора U(t) пропорционален мгновенной частоте сигнала  ,
,

Полезный сигнал равен  и он отфильтровывается ФНЧ
и он отфильтровывается ФНЧ
Мощность полезного сигнала :

Определим мощности входного и выходного шума. Мощность шума определяется как интеграл от его спектральной плотности мощности 
Мощность шума на входе приемника 
где Δω - полоса частот занимаемая ЧМ сигналом.
Полагаем, как и раньше, что шум белый со спектральной плотностью мощности
 и подставляя ее в формулу выше получим:
и подставляя ее в формулу выше получим:

Отношение сигнал/шум на входе:

Определяя No предположим что сообщение f (t) равно нулю. В этом случае колебание на входе приёмника есть сумма несущей и шума :

где  ,
, 
При демодуляции частотно-модулированных сигналов уровень амплитуды имеет значения. Вся информация заложена в его частоте.
Как и в случае АМ сигналов, рассмотрим два случая шума-малого  и большого
и большого  соответственно.
соответственно.
Для первого случая получаем :

На выходе частотного детектора имеем :

Можем найти спектр мощности на выходе фильтра низкой частоты :

Шум это полосовой шум: синосидальная+косинусидальная составляющие
Состоит из двух полос  , спектр шума равномерный имеет спектр N/2,следовательно мощность шума, будет равна 2N/2=N
, спектр шума равномерный имеет спектр N/2,следовательно мощность шума, будет равна 2N/2=N
Мощность шума на выходе нижнего частотного фильтра :

В результате находим отношение сигнал-шум по мощности на выходе детектора
окончательно получаем


Если рассматривать случай большого шума, то также возникает пороговый эффект
 Если сигнал S1/N1 ослабевает, т.е. уменьшается то сигнал невозможно принять. При большом шуме принять сигнал невозможно.
Если сигнал S1/N1 ослабевает, т.е. уменьшается то сигнал невозможно принять. При большом шуме принять сигнал невозможно.
Выходной шум приемника ФМ в отличие от ЧМ имеет равномерный спектр
Мощность выходного шума 
отношение сигнал шум равно : 
Сравним отношение сигнал шум на выходе детектора для ФМ и АМ находим

В случае ФМ как и при ЧМ, отношение S0/N0 увеличивается пропорционально квадрату полосы частот модулированного сигнала
23  Методы опроса датчиков. Самый простой метод- циклический опрос. Опрашиваем все датчики по очереди.
Методы опроса датчиков. Самый простой метод- циклический опрос. Опрашиваем все датчики по очереди.
Показывает как часто опрашиваем датчики :

А в линиях связи (выход коммутатора) :как часто работает коммутатор

Вводится понятие информативности коммутатора
 , если датчики определены с одинаковой частотой то
, если датчики определены с одинаковой частотой то 
Основной плюс, что не надо писать адрес каждый датчик имеет временную частоту. Из недостатков можно выделить тот факт что датчики есть и медленных процессов, опрашиваются так же быстро как и быстрых процессов.
Если сигнал с выхода датчика имеет частоту Fm то его следует опрашивать с частотой 
Понятно, что одни датчики имеют одну частоту опроса, а другой другую частоту. Таким образом период опроса определяется самым быстродействующим датчиком. В этом случае медленно действующие датчики опрашиваются зря- избыточность.
Так же недостаток, если возникает необходимость менять состав датчиков, то приходится перестраивать весь коммутатор.
Можно рассмотреть такую схему подключения. когда число датчиков не фиксировано, а может манятся.
 Если все ключи вверх, то Д1 будет опрашиваться в 4 раза больше. если только К1 вверх то Д5 и Д1 чаще.Если все ключи вниз-то все подряд опрашивается.
Если все ключи вверх, то Д1 будет опрашиваться в 4 раза больше. если только К1 вверх то Д5 и Д1 чаще.Если все ключи вниз-то все подряд опрашивается.
24. Многоступенчатая система опроса датчиков.
В тех случаях, когда датчики распределены в пространстве и датчиков много применяют многоступенчатые системы опроса.
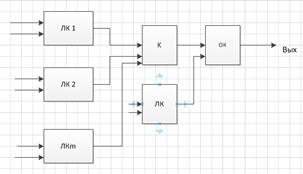
Локальные Коммутатор 1ой ступени имеет одинаковое число входов. Пример трех ступенчатая система опроса: ЛК1 – ЛКm имеют одинаковое число входов. Различают последовательный и поочередный опрос. При последовательном опросе вначале опрашиваются все датчики ЛК1 ,ЛК2 и потом последнего. При чередующемся опросе, опрашиваются последовательно все первые датчики ЛК, затем вторые датчики ЛК и т.д.
В Локальных коммутаторах понятие однотипности, мы будем понимать, что частота опроса всех датчиков одинакова (Это означает что отдельные датчики будут опрашиваться в соответствии со своим быстродействием а другие чаще чем это нужно).
Датчики локального коммутатора имеют максимальную частоту спектра сигнала – fm и поэтому они должны опрашиваться с периодом
T- цикл линейного коммутатора. За это время при последовательном опросе должны быть опрошены все датчики линейных коммутаторов.
Количество всех датчиков n*m, следовательно время K должен брать на опрос одного датчика 
При чередующемся опросе он за время T должен опросить только первые датчики всем коммутаторов 
Частота переключений каналов, какой-то ступени определяется информативностью.
 , должна представлять в виде графов.
, должна представлять в виде графов.
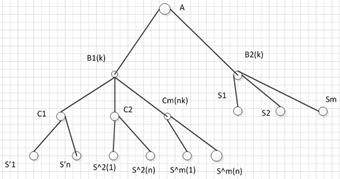
Каждая вершина коммутатора характеризуется степенью. l = числу ветвей исходящих из предыдущей вершины. Так lb1=2, lb2=2.
Частота опроса каждой вершины равна частоте опроса предыдущих вершинг деленная на степень рассматриваемой вершины

Программно адресные устройства сбора информации
Циклический опрос датчиков можно представить в следующем виде :


1) Имеется генератор импульсов и двоичный счетчик. На выходе счечика стоит дешифратор и по мере наполнения счетчика появляется выход по порядку. Эти ключи замыкаются и сигнал поступает.
2) Если код адреса поступает в регистр памяти, то датчики могут опрашиваться по программе.
При практической реализации системы опроса нужно учитывать много обстоятельств связанных с опросом датчиков. Количество таких датчиков может быть большим и датчики все не одинаковые и по значению.
Датчики можно разделить на 2 класса: цифровые и аналоговые. В конечном итоге вся информация преобразуется в цифровую. Т.е. должно использоваться АЦП кроме того часть датчиков нужно опрашивать систематически а другую часть в зависимости от возникающей ситуации. Помимо этого должна быть предусмотрена возможность визуального контроля информации с отдельных датчиков.
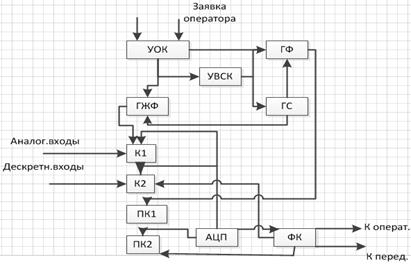
Поэтому система сбора информации оказывается достаточно сложным. Блок схему такой системы можно представить следующим образом.
ГФ- генератор форматов. УВСК- устройство выбора скорости передачи. ГС- генератор синхросигналов. ГЖФ- генератор жесткого формата. ФК- форматир.кадров. УОК- устройство обработки команд. Пк- программируемый коммутатор.
Датчики могут опрашиваться с разной частотой
Генератор жесткого формата в зависимости от ситуации может менять опрашиваемые датчики.
Обычно датчики контролируют процесс и в зависимости от технологической ситуации возникает потребность опрос тех или иных датчиков и скорости их опроса, кроме того могут возникать внештатные ситуации когда требуется знание информации от целого ряда датчиков и это должно быть предусмотрено.
Блок-схема :
25,26.27
Адаптирование коммутирование источников информации
Предполагает опрос только информативных датчиков. Для этого каждый датчик должен давать информацию или проверяться на величину этой информативности. В качестве такой величины рассматривается погрешность аппроксимации. Суть работы, которой заключается в следующем : по предыдущему значению отсчета датчика, прогнозируются его значение вых. сигнала датчика к след. моменту опроса. Если разница между этим значением будет у каждого датчика наибольшая, то он и опрашивается. Опрос остальных датчиков игнорируется.
Построение таких систем: параллельные,последовательно-цикличный,параллельно-цикличный,последовательные.